 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEasyCalib: Simple and Low-Cost In-Situ Calibration for Force Reconstruction with Vision-Based Tactile Sensors
Mar 15, 2024For elastomer-based tactile sensors, represented by visuotactile sensors, routine calibration of mechanical parameters (Young's modulus and Poisson's ratio) has been shown to be important for force reconstruction. However, the reliance on existing in-situ calibration methods for accurate force measurements limits their cost-effective and flexible applications. This article proposes a new in-situ calibration scheme that relies only on comparing contact deformation. Based on the detailed derivations of the normal contact and torsional contact theories, we designed a simple and low-cost calibration device, EasyCalib, and validated its effectiveness through extensive finite element analysis. We also explored the accuracy of EasyCalib in the practical application and demonstrated that accurate contact distributed force reconstruction can be realized based on the mechanical parameters obtained. EasyCalib balances low hardware cost, ease of operation, and low dependence on technical expertise and is expected to provide the necessary accuracy guarantees for wide applications of visuotactile sensors in the wild.
Incipient Slip-Based Rotation Measurement via Visuotactile Sensing During In-Hand Object Pivoting
Sep 14, 2023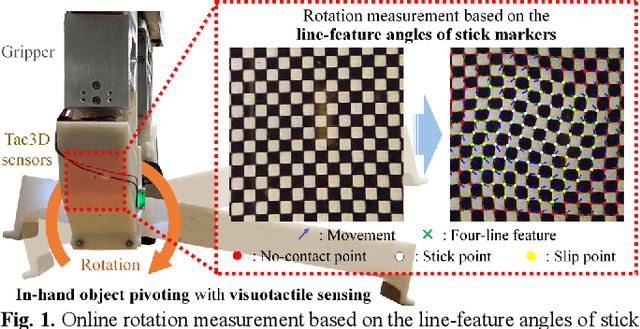
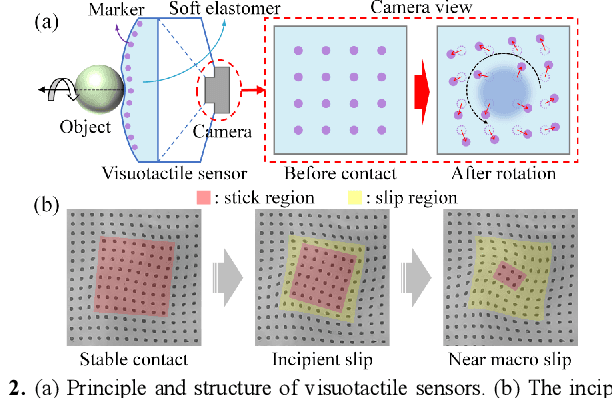
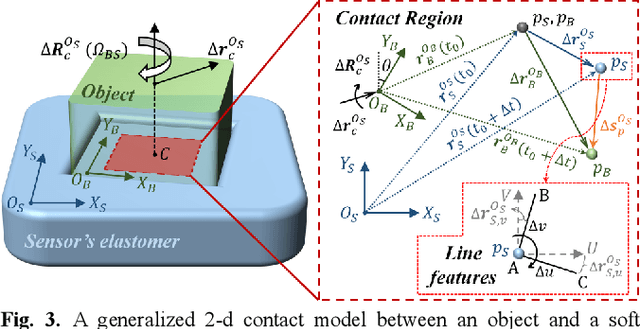
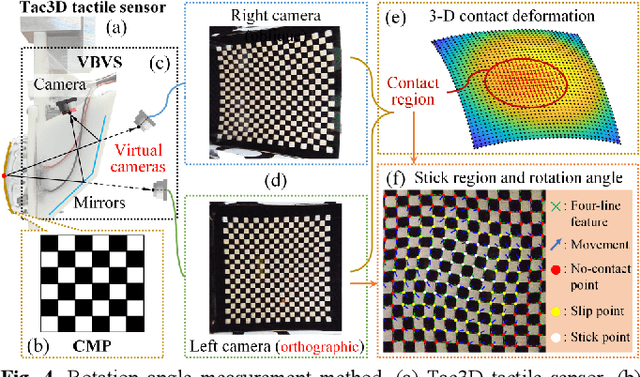
In typical in-hand manipulation tasks represented by object pivoting, the real-time perception of rotational slippage has been proven beneficial for improving the dexterity and stability of robotic hands. An effective strategy is to obtain the contact properties for measuring rotation angle through visuotactile sensing. However, existing methods for rotation estimation did not consider the impact of the incipient slip during the pivoting process, which introduces measurement errors and makes it hard to determine the boundary between stable contact and macro slip. This paper describes a generalized 2-d contact model under pivoting, and proposes a rotation measurement method based on the line-features in the stick region. The proposed method was applied to the Tac3D vision-based tactile sensors using continuous marker patterns. Experiments show that the rotation measurement system could achieve an average static measurement error of 0.17 degree and an average dynamic measurement error of 1.34 degree. Besides, the proposed method requires no training data and can achieve real-time sensing during the in-hand object pivoting.
Real-time and Robust Feature Detection of Continuous Marker Pattern for Dense 3-D Deformation Measurement
May 22, 2023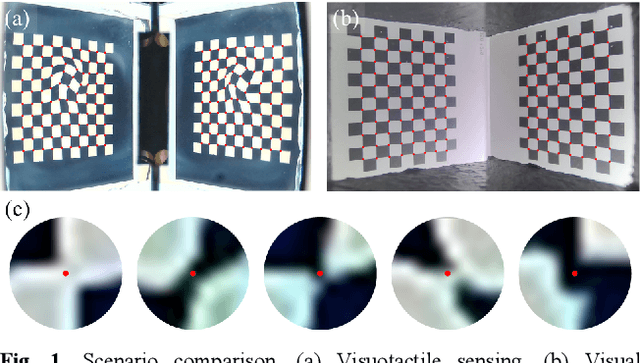
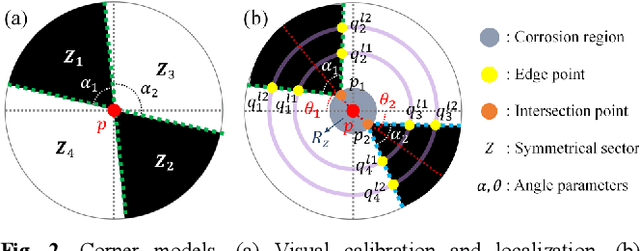
Visuotactile sensing technology has received much attention in recent years. This article proposes a feature detection method applicable to visuotactile sensors based on continuous marker patterns (CMP) to measure 3-d deformation. First, we construct the feature model of checkerboard-like corners under contact deformation, and design a novel double-layer circular sampler. Then, we propose the judging criteria and response function of corner features by analyzing sampling signals' amplitude-frequency characteristics and circular cross-correlation behavior. The proposed feature detection algorithm fully considers the boundary characteristics retained by the corners with geometric distortion, thus enabling reliable detection at a low calculation cost. The experimental results show that the proposed method has significant advantages in terms of real-time and robustness. Finally, we have achieved the high-density 3-d contact deformation visualization based on this detection method. This technique is able to clearly record the process of contact deformation, thus enabling inverse sensing of dynamic contact processes.