 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIncipient Slip-Based Rotation Measurement via Visuotactile Sensing During In-Hand Object Pivoting
Paper and Code
Sep 14, 2023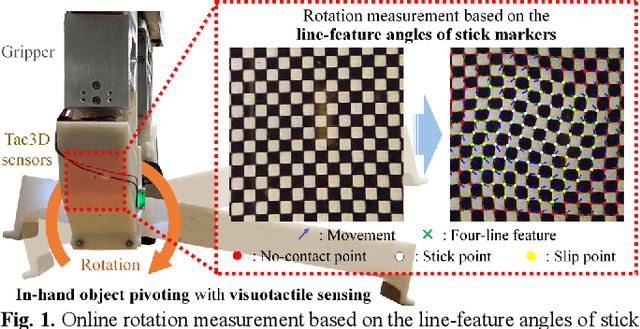
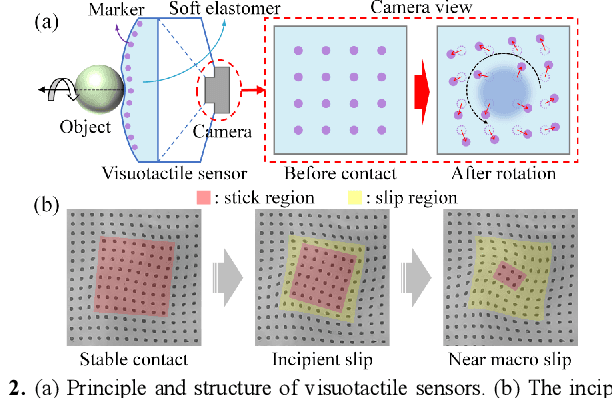
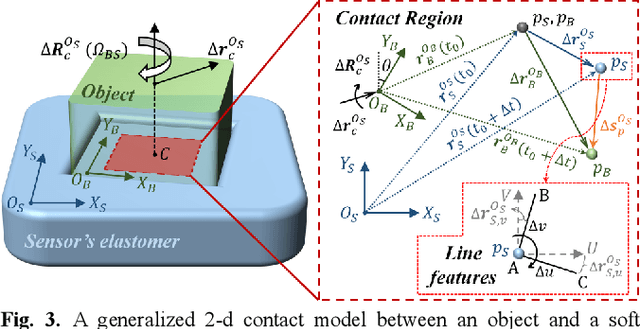
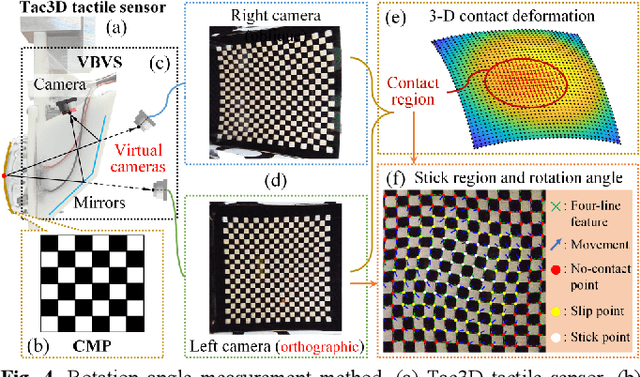
In typical in-hand manipulation tasks represented by object pivoting, the real-time perception of rotational slippage has been proven beneficial for improving the dexterity and stability of robotic hands. An effective strategy is to obtain the contact properties for measuring rotation angle through visuotactile sensing. However, existing methods for rotation estimation did not consider the impact of the incipient slip during the pivoting process, which introduces measurement errors and makes it hard to determine the boundary between stable contact and macro slip. This paper describes a generalized 2-d contact model under pivoting, and proposes a rotation measurement method based on the line-features in the stick region. The proposed method was applied to the Tac3D vision-based tactile sensors using continuous marker patterns. Experiments show that the rotation measurement system could achieve an average static measurement error of 0.17 degree and an average dynamic measurement error of 1.34 degree. Besides, the proposed method requires no training data and can achieve real-time sensing during the in-hand object pivoting.