 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Survey on Imitation Learning for Contact-Rich Tasks in Robotics
Jun 16, 2025This paper comprehensively surveys research trends in imitation learning for contact-rich robotic tasks. Contact-rich tasks, which require complex physical interactions with the environment, represent a central challenge in robotics due to their nonlinear dynamics and sensitivity to small positional deviations. The paper examines demonstration collection methodologies, including teaching methods and sensory modalities crucial for capturing subtle interaction dynamics. We then analyze imitation learning approaches, highlighting their applications to contact-rich manipulation. Recent advances in multimodal learning and foundation models have significantly enhanced performance in complex contact tasks across industrial, household, and healthcare domains. Through systematic organization of current research and identification of challenges, this survey provides a foundation for future advancements in contact-rich robotic manipulation.
Stability analysis of admittance control using asymmetric stiffness matrix
Jun 21, 2023In contact-rich tasks, setting the stiffness of the control system is a critical factor in its performance. Although the setting range can be extended by making the stiffness matrix asymmetric, its stability has not been proven. This study focuses on the stability of compliance control in a robot arm that deals with an asymmetric stiffness matrix. It discusses the convergence stability of the admittance control. The paper explains how to derive an asymmetric stiffness matrix and how to incorporate it into the admittance model. The authors also present simulation and experimental results that demonstrate the effectiveness of their proposed method.
A Self-Tuning Impedance-based Interaction Planner for Robotic Haptic Exploration
Mar 10, 2022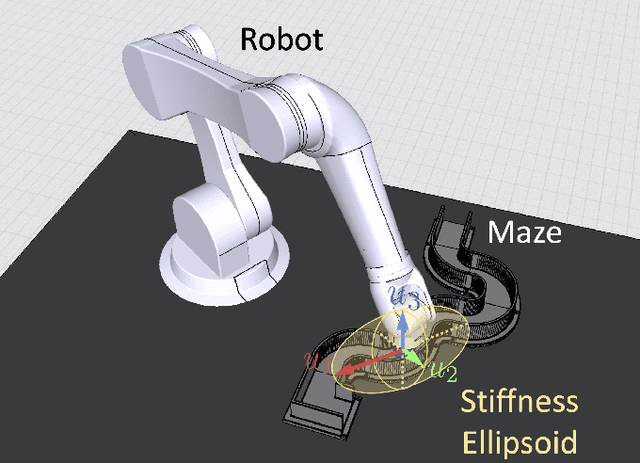
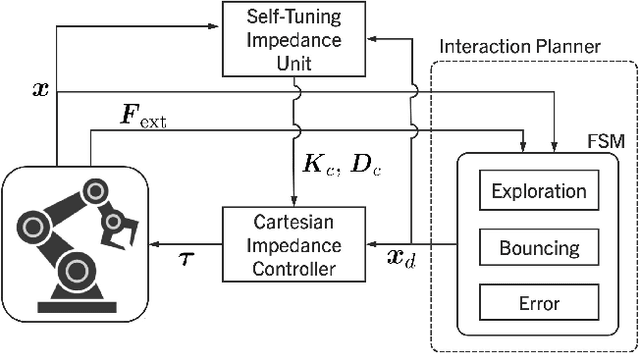
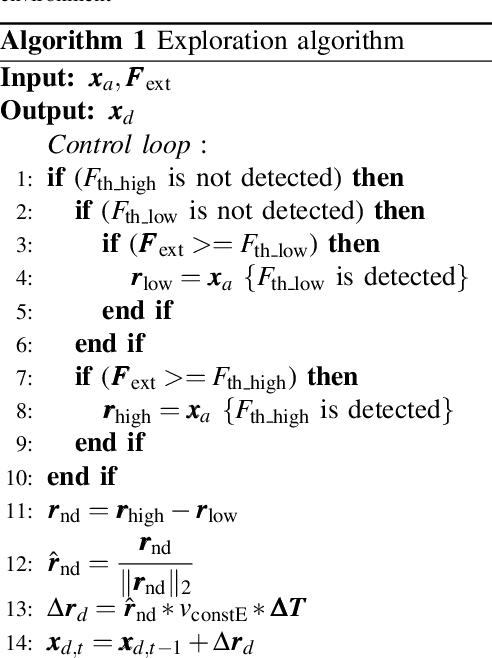
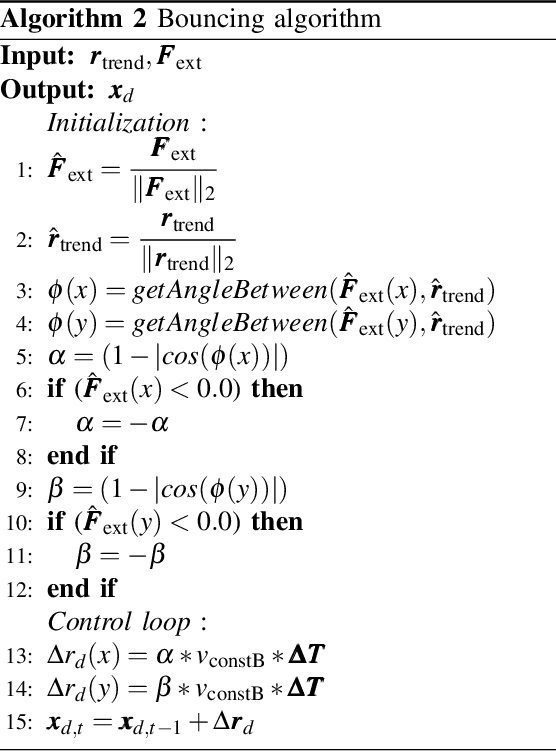
This paper presents a novel interaction planning method that exploits impedance tuning techniques in response to environmental uncertainties and unpredictable conditions using haptic information only. The proposed algorithm plans the robot's trajectory based on the haptic interaction with the environment and adapts planning strategies as needed. Two approaches are considered: Exploration and Bouncing strategies. The Exploration strategy takes the actual motion of the robot into account in planning, while the Bouncing strategy exploits the forces and the motion vector of the robot. Moreover, self-tuning impedance is performed according to the planned trajectory to ensure stable contact and low contact forces. In order to show the performance of the proposed methodology, two experiments with a torque-controller robotic arm are carried out. The first considers a maze exploration without obstacles, whereas the second includes obstacles. The proposed method performance is analyzed and compared against previously proposed solutions in both cases. Experimental results demonstrate that: i) the robot can successfully plan its trajectory autonomously in the most feasible direction according to the interaction with the environment, and ii) a stable interaction with an unknown environment despite the uncertainties is achieved. Finally, a scalability demonstration is carried out to show the potential of the proposed method under multiple scenarios.