 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCurve-Aware Gaussian Splatting for 3D Parametric Curve Reconstruction
Jun 26, 2025This paper presents an end-to-end framework for reconstructing 3D parametric curves directly from multi-view edge maps. Contrasting with existing two-stage methods that follow a sequential ``edge point cloud reconstruction and parametric curve fitting'' pipeline, our one-stage approach optimizes 3D parametric curves directly from 2D edge maps, eliminating error accumulation caused by the inherent optimization gap between disconnected stages. However, parametric curves inherently lack suitability for rendering-based multi-view optimization, necessitating a complementary representation that preserves their geometric properties while enabling differentiable rendering. We propose a novel bi-directional coupling mechanism between parametric curves and edge-oriented Gaussian components. This tight correspondence formulates a curve-aware Gaussian representation, \textbf{CurveGaussian}, that enables differentiable rendering of 3D curves, allowing direct optimization guided by multi-view evidence. Furthermore, we introduce a dynamically adaptive topology optimization framework during training to refine curve structures through linearization, merging, splitting, and pruning operations. Comprehensive evaluations on the ABC dataset and real-world benchmarks demonstrate our one-stage method's superiority over two-stage alternatives, particularly in producing cleaner and more robust reconstructions. Additionally, by directly optimizing parametric curves, our method significantly reduces the parameter count during training, achieving both higher efficiency and superior performance compared to existing approaches.
Multi-resolution Monocular Depth Map Fusion by Self-supervised Gradient-based Composition
Dec 03, 2022
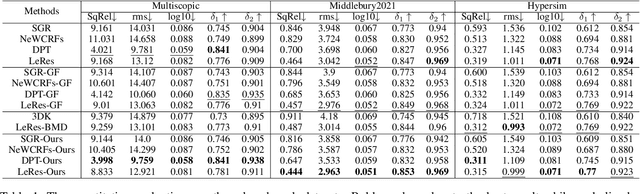
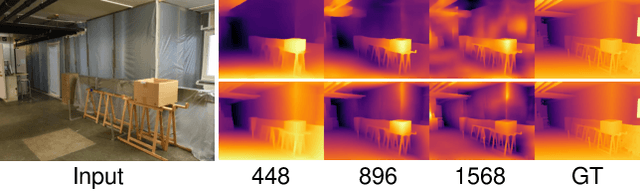
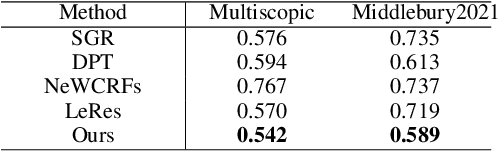
Monocular depth estimation is a challenging problem on which deep neural networks have demonstrated great potential. However, depth maps predicted by existing deep models usually lack fine-grained details due to the convolution operations and the down-samplings in networks. We find that increasing input resolution is helpful to preserve more local details while the estimation at low resolution is more accurate globally. Therefore, we propose a novel depth map fusion module to combine the advantages of estimations with multi-resolution inputs. Instead of merging the low- and high-resolution estimations equally, we adopt the core idea of Poisson fusion, trying to implant the gradient domain of high-resolution depth into the low-resolution depth. While classic Poisson fusion requires a fusion mask as supervision, we propose a self-supervised framework based on guided image filtering. We demonstrate that this gradient-based composition performs much better at noisy immunity, compared with the state-of-the-art depth map fusion method. Our lightweight depth fusion is one-shot and runs in real-time, making our method 80X faster than a state-of-the-art depth fusion method. Quantitative evaluations demonstrate that the proposed method can be integrated into many fully convolutional monocular depth estimation backbones with a significant performance boost, leading to state-of-the-art results of detail enhancement on depth maps.