 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBeyond Benchmark Islands: Toward Representative Trustworthiness Evaluation for Agentic AI
Mar 16, 2026As agentic AI systems move beyond static question answering into open-ended, tool-augmented, and multi-step real-world workflows, their increased authority poses greater risks of system misuse and operational failures. However, current evaluation practices remain fragmented, measuring isolated capabilities such as coding, hallucination, jailbreak resistance, or tool use in narrowly defined settings. We argue that the central limitation is not merely insufficient coverage of evaluation dimensions, but the lack of a principled notion of representativeness: an agent's trustworthiness should be assessed over a representative socio-technical scenario distribution rather than a collection of disconnected benchmark instances. To this end, we propose the Holographic Agent Assessment Framework (HAAF), a systematic evaluation paradigm that characterizes agent trustworthiness over a scenario manifold spanning task types, tool interfaces, interaction dynamics, social contexts, and risk levels. The framework integrates four complementary components: (i) static cognitive and policy analysis, (ii) interactive sandbox simulation, (iii) social-ethical alignment assessment, and (iv) a distribution-aware representative sampling engine that jointly optimizes coverage and risk sensitivity -- particularly for rare but high-consequence tail risks that conventional benchmarks systematically overlook. These components are connected through an iterative Trustworthy Optimization Factory. Through cycles of red-team probing and blue-team hardening, this paradigm progressively narrows the vulnerabilities to meet deployment standards, shifting agent evaluation from benchmark islands toward representative, real-world trustworthiness. Code and data for the illustrative instantiation are available at https://github.com/TonyQJH/haaf-pilot.
Multimodality in Meta-Learning: A Comprehensive Survey
Sep 28, 2021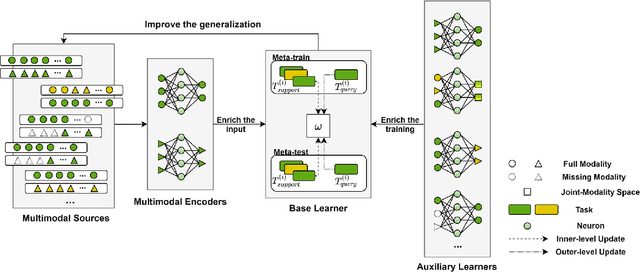
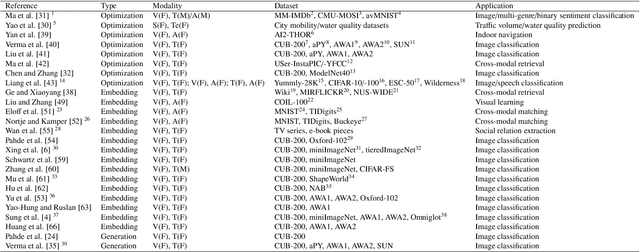
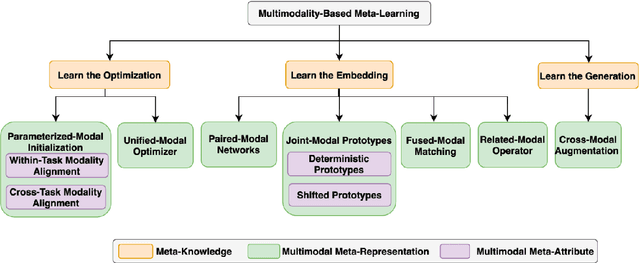
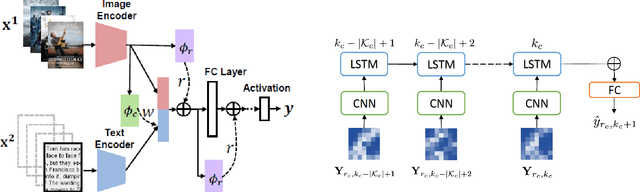
Meta-learning has gained wide popularity as a training framework that is more data-efficient than traditional machine learning methods. However, its generalization ability in complex task distributions, such as multimodal tasks, has not been thoroughly studied. Recently, some studies on multimodality-based meta-learning have emerged. This survey provides a comprehensive overview of the multimodality-based meta-learning landscape in terms of the methodologies and applications. We first formalize the definition of meta-learning and multimodality, along with the research challenges in this growing field, such as how to enrich the input in few-shot or zero-shot scenarios and how to generalize the models to new tasks. We then propose a new taxonomy to systematically discuss typical meta-learning algorithms combined with multimodal tasks. We investigate the contributions of related papers and summarize them by our taxonomy. Finally, we propose potential research directions for this promising field.
AutoGraph: Automated Graph Neural Network
Nov 23, 2020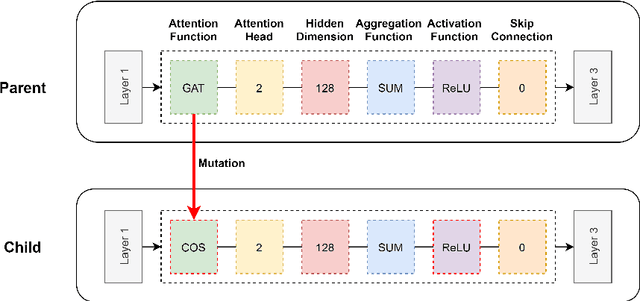
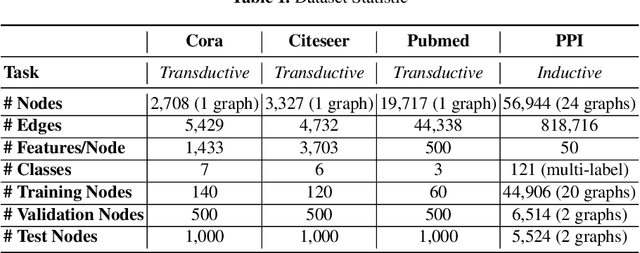
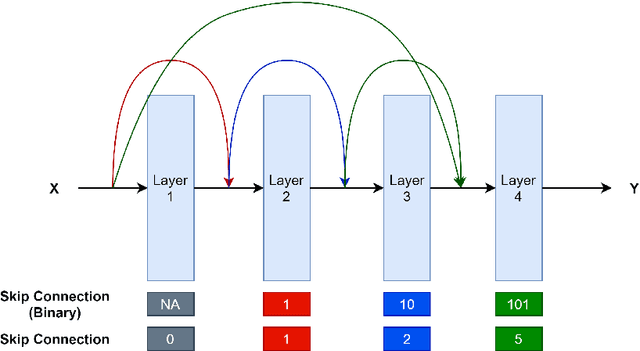
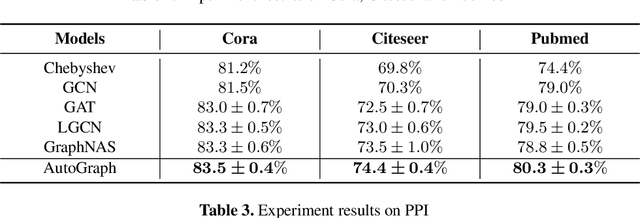
Graphs play an important role in many applications. Recently, Graph Neural Networks (GNNs) have achieved promising results in graph analysis tasks. Some state-of-the-art GNN models have been proposed, e.g., Graph Convolutional Networks (GCNs), Graph Attention Networks (GATs), etc. Despite these successes, most of the GNNs only have shallow structure. This causes the low expressive power of the GNNs. To fully utilize the power of the deep neural network, some deep GNNs have been proposed recently. However, the design of deep GNNs requires significant architecture engineering. In this work, we propose a method to automate the deep GNNs design. In our proposed method, we add a new type of skip connection to the GNNs search space to encourage feature reuse and alleviate the vanishing gradient problem. We also allow our evolutionary algorithm to increase the layers of GNNs during the evolution to generate deeper networks. We evaluate our method in the graph node classification task. The experiments show that the GNNs generated by our method can obtain state-of-the-art results in Cora, Citeseer, Pubmed and PPI datasets.