 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWeakSurg: Weakly supervised surgical instrument segmentation using temporal equivariance and semantic continuity
Mar 14, 2024
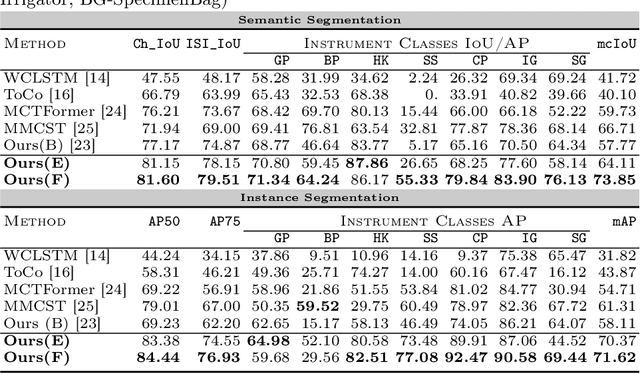


Weakly supervised surgical instrument segmentation with only instrument presence labels has been rarely explored in surgical domain. To mitigate the highly under-constrained challenges, we extend a two-stage weakly supervised segmentation paradigm with temporal attributes from two perspectives. From a temporal equivariance perspective, we propose a prototype-based temporal equivariance regulation loss to enhance pixel-wise consistency between adjacent features. From a semantic continuity perspective, we propose a class-aware temporal semantic continuity loss to constrain the semantic consistency between a global view of target frame and local non-discriminative regions of adjacent reference frame. To the best of our knowledge, WeakSurg is the first instrument-presence-only weakly supervised segmentation architecture to take temporal information into account for surgical scenarios. Extensive experiments are validated on Cholec80, an open benchmark for phase and instrument recognition. We annotate instance-wise instrument labels with fixed time-steps which are double checked by a clinician with 3-years experience. Our results show that WeakSurg compares favorably with state-of-the-art methods not only on semantic segmentation metrics but also on instance segmentation metrics.
MURPHY: Relations Matter in Surgical Workflow Analysis
Dec 24, 2022Autonomous robotic surgery has advanced significantly based on analysis of visual and temporal cues in surgical workflow, but relational cues from domain knowledge remain under investigation. Complex relations in surgical annotations can be divided into intra- and inter-relations, both valuable to autonomous systems to comprehend surgical workflows. Intra- and inter-relations describe the relevance of various categories within a particular annotation type and the relevance of different annotation types, respectively. This paper aims to systematically investigate the importance of relational cues in surgery. First, we contribute the RLLS12M dataset, a large-scale collection of robotic left lateral sectionectomy (RLLS), by curating 50 videos of 50 patients operated by 5 surgeons and annotating a hierarchical workflow, which consists of 3 inter- and 6 intra-relations, 6 steps, 15 tasks, and 38 activities represented as the triplet of 11 instruments, 8 actions, and 16 objects, totaling 2,113,510 video frames and 12,681,060 annotation entities. Correspondingly, we propose a multi-relation purification hybrid network (MURPHY), which aptly incorporates novel relation modules to augment the feature representation by purifying relational features using the intra- and inter-relations embodied in annotations. The intra-relation module leverages a R-GCN to implant visual features in different graph relations, which are aggregated using a targeted relation purification with affinity information measuring label consistency and feature similarity. The inter-relation module is motivated by attention mechanisms to regularize the influence of relational features based on the hierarchy of annotation types from the domain knowledge. Extensive experimental results on the curated RLLS dataset confirm the effectiveness of our approach, demonstrating that relations matter in surgical workflow analysis.
3D endoscopic depth estimation using 3D surface-aware constraints
Mar 04, 2022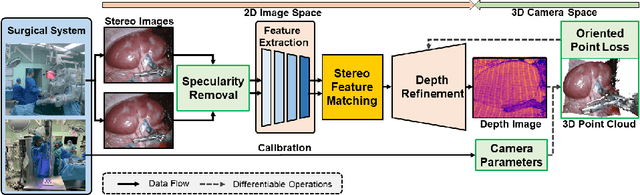
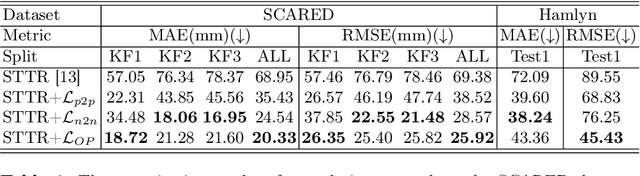
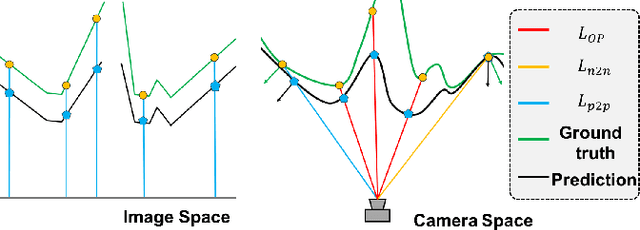

Robotic-assisted surgery allows surgeons to conduct precise surgical operations with stereo vision and flexible motor control. However, the lack of 3D spatial perception limits situational awareness during procedures and hinders mastering surgical skills in the narrow abdominal space. Depth estimation, as a representative perception task, is typically defined as an image reconstruction problem. In this work, we show that depth estimation can be reformed from a 3D surface perspective. We propose a loss function for depth estimation that integrates the surface-aware constraints, leading to a faster and better convergence with the valid information from spatial information. In addition, camera parameters are incorporated into the training pipeline to increase the control and transparency of the depth estimation. We also integrate a specularity removal module to recover more buried image information. Quantitative experimental results on endoscopic datasets and user studies with medical professionals demonstrate the effectiveness of our method.