 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Scale Generative Modeling with Heat Dissipation Flow Matching
May 19, 2026Diffusion models are widely used in image generation, with most relying on noise-based corruption and denoising. A distinct branch instead uses blur as the main corruption, preserving better color budgets and multi-scale detail by providing multi-scale priors. However, blur-based models remain in SDE-based frameworks and are not integrated into ODE-based frameworks, such as Flow Matching (FM). Meanwhile, in the blur-based formulation, the classical inverse heat-dissipation (IHD) process faces an ill-posed challenge. Moreover, under the data-manifold assumption, regressing blurred images from high-dimensional noise (or velocity) space is also difficult. We propose Heat Dissipation Flow Matching (HDFM), which introduces a continuous blurred (heat-dissipation) process into FM to inject multi-scale priors. HDFM aligns an interpolated heat-dissipation path to address ill-posedness and adopts $x$-prediction to mitigate high-dimensional regression difficulty. Toy experiments and ablation studies show that HDFM consistently benefits from both blur and $x$-prediction. The performance of HDFM outperforms most baseline methods on all datasets.
Look Closer! An Adversarial Parametric Editing Framework for Hallucination Mitigation in VLMs
Dec 26, 2025While Vision-Language Models (VLMs) have garnered increasing attention in the AI community due to their promising practical applications, they exhibit persistent hallucination issues, generating outputs misaligned with visual inputs. Recent studies attribute these hallucinations to VLMs' over-reliance on linguistic priors and insufficient visual feature integration, proposing heuristic decoding calibration strategies to mitigate them. However, the non-trainable nature of these strategies inherently limits their optimization potential. To this end, we propose an adversarial parametric editing framework for Hallucination mitigation in VLMs, which follows an \textbf{A}ctivate-\textbf{L}ocate-\textbf{E}dit \textbf{A}dversarially paradigm. Specifically, we first construct an activation dataset that comprises grounded responses (positive samples attentively anchored in visual features) and hallucinatory responses (negative samples reflecting LLM prior bias and internal knowledge artifacts). Next, we identify critical hallucination-prone parameter clusters by analyzing differential hidden states of response pairs. Then, these clusters are fine-tuned using prompts injected with adversarial tuned prefixes that are optimized to maximize visual neglect, thereby forcing the model to prioritize visual evidence over inherent parametric biases. Evaluations on both generative and discriminative VLM tasks demonstrate the significant effectiveness of ALEAHallu in alleviating hallucinations. Our code is available at https://github.com/hujiayu1223/ALEAHallu.
Assisted Refinement Network Based on Channel Information Interaction for Camouflaged and Salient Object Detection
Dec 12, 2025Camouflaged Object Detection (COD) stands as a significant challenge in computer vision, dedicated to identifying and segmenting objects visually highly integrated with their backgrounds. Current mainstream methods have made progress in cross-layer feature fusion, but two critical issues persist during the decoding stage. The first is insufficient cross-channel information interaction within the same-layer features, limiting feature expressiveness. The second is the inability to effectively co-model boundary and region information, making it difficult to accurately reconstruct complete regions and sharp boundaries of objects. To address the first issue, we propose the Channel Information Interaction Module (CIIM), which introduces a horizontal-vertical integration mechanism in the channel dimension. This module performs feature reorganization and interaction across channels to effectively capture complementary cross-channel information. To address the second issue, we construct a collaborative decoding architecture guided by prior knowledge. This architecture generates boundary priors and object localization maps through Boundary Extraction (BE) and Region Extraction (RE) modules, then employs hybrid attention to collaboratively calibrate decoded features, effectively overcoming semantic ambiguity and imprecise boundaries. Additionally, the Multi-scale Enhancement (MSE) module enriches contextual feature representations. Extensive experiments on four COD benchmark datasets validate the effectiveness and state-of-the-art performance of the proposed model. We further transferred our model to the Salient Object Detection (SOD) task and demonstrated its adaptability across downstream tasks, including polyp segmentation, transparent object detection, and industrial and road defect detection. Code and experimental results are publicly available at: https://github.com/akuan1234/ARNet-v2.
HiProbe-VAD: Video Anomaly Detection via Hidden States Probing in Tuning-Free Multimodal LLMs
Jul 23, 2025



Video Anomaly Detection (VAD) aims to identify and locate deviations from normal patterns in video sequences. Traditional methods often struggle with substantial computational demands and a reliance on extensive labeled datasets, thereby restricting their practical applicability. To address these constraints, we propose HiProbe-VAD, a novel framework that leverages pre-trained Multimodal Large Language Models (MLLMs) for VAD without requiring fine-tuning. In this paper, we discover that the intermediate hidden states of MLLMs contain information-rich representations, exhibiting higher sensitivity and linear separability for anomalies compared to the output layer. To capitalize on this, we propose a Dynamic Layer Saliency Probing (DLSP) mechanism that intelligently identifies and extracts the most informative hidden states from the optimal intermediate layer during the MLLMs reasoning. Then a lightweight anomaly scorer and temporal localization module efficiently detects anomalies using these extracted hidden states and finally generate explanations. Experiments on the UCF-Crime and XD-Violence datasets demonstrate that HiProbe-VAD outperforms existing training-free and most traditional approaches. Furthermore, our framework exhibits remarkable cross-model generalization capabilities in different MLLMs without any tuning, unlocking the potential of pre-trained MLLMs for video anomaly detection and paving the way for more practical and scalable solutions.
Fine-Grained Trajectory-based Travel Time Estimation for Multi-city Scenarios Based on Deep Meta-Learning
Jan 20, 2022

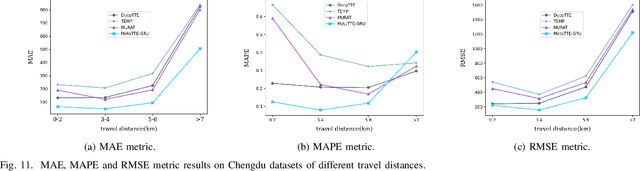

Travel Time Estimation (TTE) is indispensable in intelligent transportation system (ITS). It is significant to achieve the fine-grained Trajectory-based Travel Time Estimation (TTTE) for multi-city scenarios, namely to accurately estimate travel time of the given trajectory for multiple city scenarios. However, it faces great challenges due to complex factors including dynamic temporal dependencies and fine-grained spatial dependencies. To tackle these challenges, we propose a meta learning based framework, MetaTTE, to continuously provide accurate travel time estimation over time by leveraging well-designed deep neural network model called DED, which consists of Data preprocessing module and Encoder-Decoder network module. By introducing meta learning techniques, the generalization ability of MetaTTE is enhanced using small amount of examples, which opens up new opportunities to increase the potential of achieving consistent performance on TTTE when traffic conditions and road networks change over time in the future. The DED model adopts an encoder-decoder network to capture fine-grained spatial and temporal representations. Extensive experiments on two real-world datasets are conducted to confirm that our MetaTTE outperforms six state-of-art baselines, and improve 29.35% and 25.93% accuracy than the best baseline on Chengdu and Porto datasets, respectively.
STformer: A Noise-Aware Efficient Spatio-Temporal Transformer Architecture for Traffic Forecasting
Dec 06, 2021
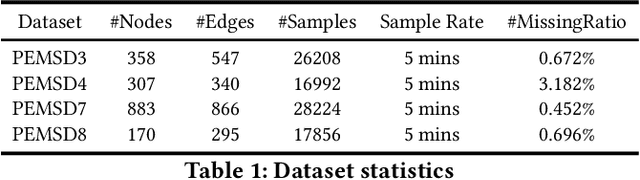

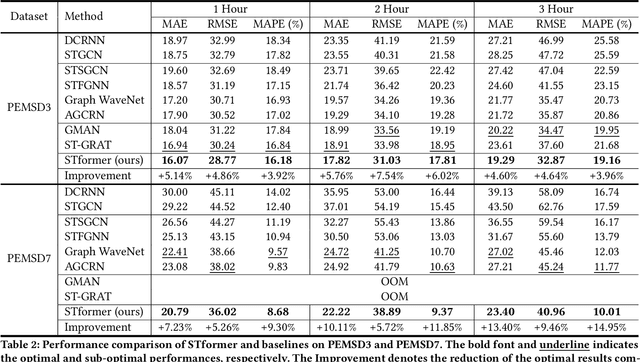
Traffic forecasting plays an indispensable role in the intelligent transportation system, which makes daily travel more convenient and safer. However, the dynamic evolution of spatio-temporal correlations makes accurate traffic forecasting very difficult. Existing work mainly employs graph neural netwroks (GNNs) and deep time series models (e.g., recurrent neural networks) to capture complex spatio-temporal patterns in the dynamic traffic system. For the spatial patterns, it is difficult for GNNs to extract the global spatial information, i.e., remote sensors information in road networks. Although we can use the self-attention to extract global spatial information as in the previous work, it is also accompanied by huge resource consumption. For the temporal patterns, traffic data have not only easy-to-recognize daily and weekly trends but also difficult-to-recognize short-term noise caused by accidents (e.g., car accidents and thunderstorms). Prior traffic models are difficult to distinguish intricate temporal patterns in time series and thus hard to get accurate temporal dependence. To address above issues, we propose a novel noise-aware efficient spatio-temporal Transformer architecture for accurate traffic forecasting, named STformer. STformer consists of two components, which are the noise-aware temporal self-attention (NATSA) and the graph-based sparse spatial self-attention (GBS3A). NATSA separates the high-frequency component and the low-frequency component from the time series to remove noise and capture stable temporal dependence by the learnable filter and the temporal self-attention, respectively. GBS3A replaces the full query in vanilla self-attention with the graph-based sparse query to decrease the time and memory usage. Experiments on four real-world traffic datasets show that STformer outperforms state-of-the-art baselines with lower computational cost.
CDGNet: A Cross-Time Dynamic Graph-based Deep Learning Model for Traffic Forecasting
Dec 06, 2021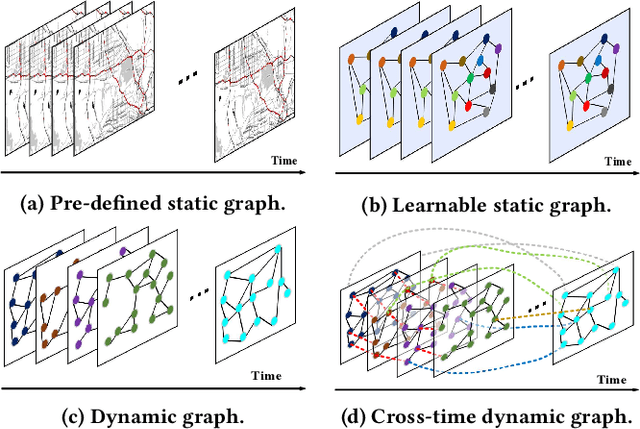
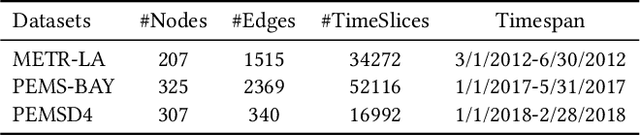
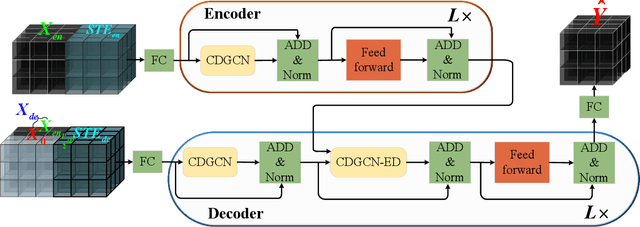
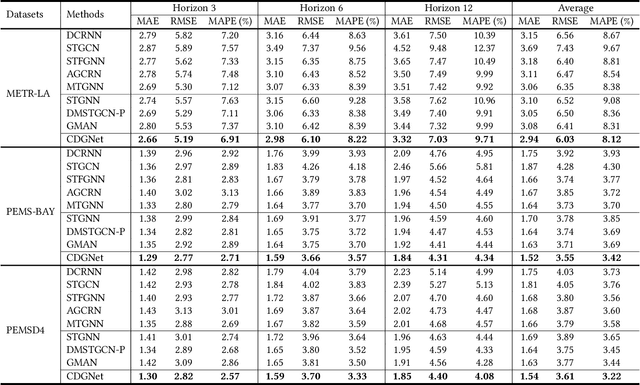
Traffic forecasting is important in intelligent transportation systems of webs and beneficial to traffic safety, yet is very challenging because of the complex and dynamic spatio-temporal dependencies in real-world traffic systems. Prior methods use the pre-defined or learnable static graph to extract spatial correlations. However, the static graph-based methods fail to mine the evolution of the traffic network. Researchers subsequently generate the dynamic graph for each time slice to reflect the changes of spatial correlations, but they follow the paradigm of independently modeling spatio-temporal dependencies, ignoring the cross-time spatial influence. In this paper, we propose a novel cross-time dynamic graph-based deep learning model, named CDGNet, for traffic forecasting. The model is able to effectively capture the cross-time spatial dependence between each time slice and its historical time slices by utilizing the cross-time dynamic graph. Meanwhile, we design a gating mechanism to sparse the cross-time dynamic graph, which conforms to the sparse spatial correlations in the real world. Besides, we propose a novel encoder-decoder architecture to incorporate the cross-time dynamic graph-based GCN for multi-step traffic forecasting. Experimental results on three real-world public traffic datasets demonstrate that CDGNet outperforms the state-of-the-art baselines. We additionally provide a qualitative study to analyze the effectiveness of our architecture.
DMGCRN: Dynamic Multi-Graph Convolution Recurrent Network for Traffic Forecasting
Dec 04, 2021



Traffic forecasting is a problem of intelligent transportation systems (ITS) and crucial for individuals and public agencies. Therefore, researches pay great attention to deal with the complex spatio-temporal dependencies of traffic system for accurate forecasting. However, there are two challenges: 1) Most traffic forecasting studies mainly focus on modeling correlations of neighboring sensors and ignore correlations of remote sensors, e.g., business districts with similar spatio-temporal patterns; 2) Prior methods which use static adjacency matrix in graph convolutional networks (GCNs) are not enough to reflect the dynamic spatial dependence in traffic system. Moreover, fine-grained methods which use self-attention to model dynamic correlations of all sensors ignore hierarchical information in road networks and have quadratic computational complexity. In this paper, we propose a novel dynamic multi-graph convolution recurrent network (DMGCRN) to tackle above issues, which can model the spatial correlations of distance, the spatial correlations of structure, and the temporal correlations simultaneously. We not only use the distance-based graph to capture spatial information from nodes are close in distance but also construct a novel latent graph which encoded the structure correlations among roads to capture spatial information from nodes are similar in structure. Furthermore, we divide the neighbors of each sensor into coarse-grained regions, and dynamically assign different weights to each region at different times. Meanwhile, we integrate the dynamic multi-graph convolution network into the gated recurrent unit (GRU) to capture temporal dependence. Extensive experiments on three real-world traffic datasets demonstrate that our proposed algorithm outperforms state-of-the-art baselines.
STJLA: A Multi-Context Aware Spatio-Temporal Joint Linear Attention Network for Traffic Forecasting
Dec 04, 2021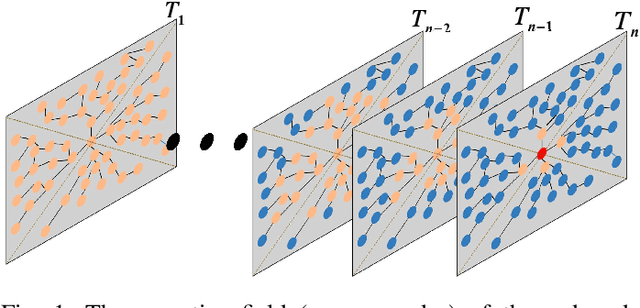
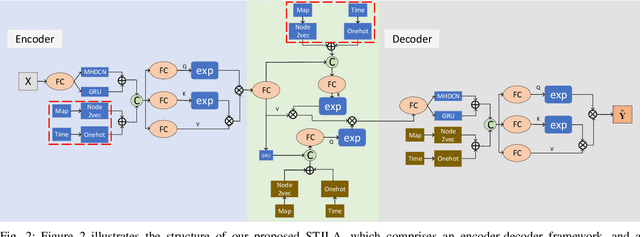
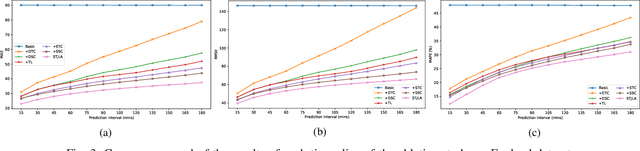
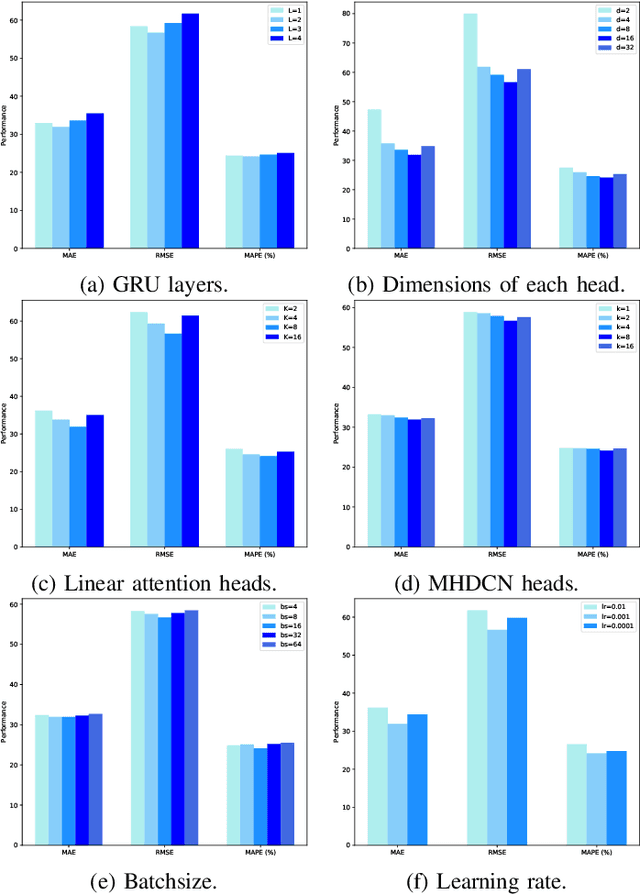
Traffic prediction has gradually attracted the attention of researchers because of the increase in traffic big data. Therefore, how to mine the complex spatio-temporal correlations in traffic data to predict traffic conditions more accurately become a difficult problem. Previous works combined graph convolution networks (GCNs) and self-attention mechanism with deep time series models (e.g. recurrent neural networks) to capture the spatio-temporal correlations separately, ignoring the relationships across time and space. Besides, GCNs are limited by over-smoothing issue and self-attention is limited by quadratic problem, result in GCNs lack global representation capabilities, and self-attention inefficiently capture the global spatial dependence. In this paper, we propose a novel deep learning model for traffic forecasting, named Multi-Context Aware Spatio-Temporal Joint Linear Attention (STJLA), which applies linear attention to the spatio-temporal joint graph to capture global dependence between all spatio-temporal nodes efficiently. More specifically, STJLA utilizes static structural context and dynamic semantic context to improve model performance. The static structure context based on node2vec and one-hot encoding enriches the spatio-temporal position information. Furthermore, the multi-head diffusion convolution network based dynamic spatial context enhances the local spatial perception ability, and the GRU based dynamic temporal context stabilizes sequence position information of the linear attention, respectively. Experiments on two real-world traffic datasets, England and PEMSD7, demonstrate that our STJLA can achieve up to 9.83% and 3.08% accuracy improvement in MAE measure over state-of-the-art baselines.