 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAct Wisely: Cultivating Meta-Cognitive Tool Use in Agentic Multimodal Models
Apr 09, 2026The advent of agentic multimodal models has empowered systems to actively interact with external environments. However, current agents suffer from a profound meta-cognitive deficit: they struggle to arbitrate between leveraging internal knowledge and querying external utilities. Consequently, they frequently fall prey to blind tool invocation, resorting to reflexive tool execution even when queries are resolvable from the raw visual context. This pathological behavior precipitates severe latency bottlenecks and injects extraneous noise that derails sound reasoning. Existing reinforcement learning protocols attempt to mitigate this via a scalarized reward that penalizes tool usage. Yet, this coupled formulation creates an irreconcilable optimization dilemma: an aggressive penalty suppresses essential tool use, whereas a mild penalty is entirely subsumed by the variance of the accuracy reward during advantage normalization, rendering it impotent against tool overuse. To transcend this bottleneck, we propose HDPO, a framework that reframes tool efficiency from a competing scalar objective to a strictly conditional one. By eschewing reward scalarization, HDPO maintains two orthogonal optimization channels: an accuracy channel that maximizes task correctness, and an efficiency channel that enforces execution economy exclusively within accurate trajectories via conditional advantage estimation. This decoupled architecture naturally induces a cognitive curriculum-compelling the agent to first master task resolution before refining its self-reliance. Extensive evaluations demonstrate that our resulting model, Metis, reduces tool invocations by orders of magnitude while simultaneously elevating reasoning accuracy.
PILD: Physics-Informed Learning via Diffusion
Jan 29, 2026Diffusion models have emerged as powerful generative tools for modeling complex data distributions, yet their purely data-driven nature limits applicability in practical engineering and scientific problems where physical laws need to be followed. This paper proposes Physics-Informed Learning via Diffusion (PILD), a framework that unifies diffusion modeling and first-principles physical constraints by introducing a virtual residual observation sampled from a Laplace distribution to supervise generation during training. To further integrate physical laws, a conditional embedding module is incorporated to inject physical information into the denoising network at multiple layers, ensuring consistent guidance throughout the diffusion process. The proposed PILD framework is concise, modular, and broadly applicable to problems governed by ordinary differential equations, partial differential equations, as well as algebraic equations or inequality constraints. Extensive experiments across engineering and scientific tasks including estimating vehicle trajectories, tire forces, Darcy flow and plasma dynamics, demonstrate that our PILD substantially improves accuracy, stability, and generalization over existing physics-informed and diffusion-based baselines.
MICROTRIPS: MICRO-geography TRavel Intelligence and Pattern Synthesis
Oct 06, 2025This study presents a novel small-area estimation framework to enhance urban transportation planning through detailed characterization of travel behavior. Our approach improves on the four-step travel model by employing publicly available microdata files and machine learning methods to predict travel behavior for a representative, synthetic population at small geographic areas. This approach enables high-resolution estimation of trip generation, trip distribution, mode choice, and route assignment. Validation using ACS/PUMS work-commute datasets demonstrates that our framework achieves higher accuracy compared to conventional approaches. The resulting granular insights enable the tailoring of interventions to address localized situations and support a range of policy applications and targeted interventions, including the optimal placement of micro-fulfillment centers, effective curb-space management, and the design of more inclusive transportation solutions particularly for vulnerable communities.
HCOMC: A Hierarchical Cooperative On-Ramp Merging Control Framework in Mixed Traffic Environment on Two-Lane Highways
Jul 15, 2025Highway on-ramp merging areas are common bottlenecks to traffic congestion and accidents. Currently, a cooperative control strategy based on connected and automated vehicles (CAVs) is a fundamental solution to this problem. While CAVs are not fully widespread, it is necessary to propose a hierarchical cooperative on-ramp merging control (HCOMC) framework for heterogeneous traffic flow on two-lane highways to address this gap. This paper extends longitudinal car-following models based on the intelligent driver model and lateral lane-changing models using the quintic polynomial curve to account for human-driven vehicles (HDVs) and CAVs, comprehensively considering human factors and cooperative adaptive cruise control. Besides, this paper proposes a HCOMC framework, consisting of a hierarchical cooperative planning model based on the modified virtual vehicle model, a discretionary lane-changing model based on game theory, and a multi-objective optimization model using the elitist non-dominated sorting genetic algorithm to ensure the safe, smooth, and efficient merging process. Then, the performance of our HCOMC is analyzed under different traffic densities and CAV penetration rates through simulation. The findings underscore our HCOMC's pronounced comprehensive advantages in enhancing the safety of group vehicles, stabilizing and expediting merging process, optimizing traffic efficiency, and economizing fuel consumption compared with benchmarks.
FreshRetailNet-50K: A Stockout-Annotated Censored Demand Dataset for Latent Demand Recovery and Forecasting in Fresh Retail
May 22, 2025
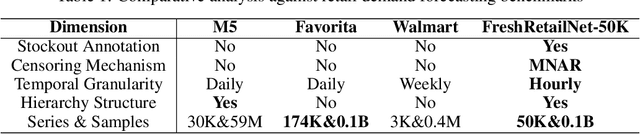
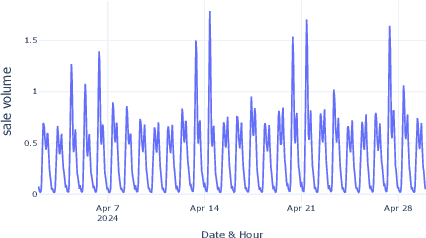

Accurate demand estimation is critical for the retail business in guiding the inventory and pricing policies of perishable products. However, it faces fundamental challenges from censored sales data during stockouts, where unobserved demand creates systemic policy biases. Existing datasets lack the temporal resolution and annotations needed to address this censoring effect. To fill this gap, we present FreshRetailNet-50K, the first large-scale benchmark for censored demand estimation. It comprises 50,000 store-product time series of detailed hourly sales data from 898 stores in 18 major cities, encompassing 863 perishable SKUs meticulously annotated for stockout events. The hourly stock status records unique to this dataset, combined with rich contextual covariates, including promotional discounts, precipitation, and temporal features, enable innovative research beyond existing solutions. We demonstrate one such use case of two-stage demand modeling: first, we reconstruct the latent demand during stockouts using precise hourly annotations. We then leverage the recovered demand to train robust demand forecasting models in the second stage. Experimental results show that this approach achieves a 2.73\% improvement in prediction accuracy while reducing the systematic demand underestimation from 7.37\% to near-zero bias. With unprecedented temporal granularity and comprehensive real-world information, FreshRetailNet-50K opens new research directions in demand imputation, perishable inventory optimization, and causal retail analytics. The unique annotation quality and scale of the dataset address long-standing limitations in retail AI, providing immediate solutions and a platform for future methodological innovation. The data (https://huggingface.co/datasets/Dingdong-Inc/FreshRetailNet-50K) and code (https://github.com/Dingdong-Inc/frn-50k-baseline}) are openly released.
Array SAR 3D Sparse Imaging Based on Regularization by Denoising Under Few Observed Data
May 09, 2024Array synthetic aperture radar (SAR) three-dimensional (3D) imaging can obtain 3D information of the target region, which is widely used in environmental monitoring and scattering information measurement. In recent years, with the development of compressed sensing (CS) theory, sparse signal processing is used in array SAR 3D imaging. Compared with matched filter (MF), sparse SAR imaging can effectively improve image quality. However, sparse imaging based on handcrafted regularization functions suffers from target information loss in few observed SAR data. Therefore, in this article, a general 3D sparse imaging framework based on Regulation by Denoising (RED) and proximal gradient descent type method for array SAR is presented. Firstly, we construct explicit prior terms via state-of-the-art denoising operators instead of regularization functions, which can improve the accuracy of sparse reconstruction and preserve the structure information of the target. Then, different proximal gradient descent type methods are presented, including a generalized alternating projection (GAP) and an alternating direction method of multiplier (ADMM), which is suitable for high-dimensional data processing. Additionally, the proposed method has robust convergence, which can achieve sparse reconstruction of 3D SAR in few observed SAR data. Extensive simulations and real data experiments are conducted to analyze the performance of the proposed method. The experimental results show that the proposed method has superior sparse reconstruction performance.
PLE-SLAM: A Visual-Inertial SLAM Based on Point-Line Features and Efficient IMU Initialization
Jan 05, 2024



Visual-inertial SLAM is crucial in various fields, such as aerial vehicles, industrial robots, and autonomous driving. The fusion of camera and inertial measurement unit (IMU) makes up for the shortcomings of a signal sensor, which significantly improves the accuracy and robustness of localization in challenging environments. This article presents PLE-SLAM, an accurate and real-time visual-inertial SLAM algorithm based on point-line features and efficient IMU initialization. First, we use parallel computing methods to extract features and compute descriptors to ensure real-time performance. Adjacent short line segments are merged into long line segments, and isolated short line segments are directly deleted. Second, a rotation-translation-decoupled initialization method is extended to use both points and lines. Gyroscope bias is optimized by tightly coupling IMU measurements and image observations. Accelerometer bias and gravity direction are solved by an analytical method for efficiency. To improve the system's intelligence in handling complex environments, a scheme of leveraging semantic information and geometric constraints to eliminate dynamic features and A solution for loop detection and closed-loop frame pose estimation using CNN and GNN are integrated into the system. All networks are accelerated to ensure real-time performance. The experiment results on public datasets illustrate that PLE-SLAM is one of the state-of-the-art visual-inertial SLAM systems.