 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpen-Structure: a Structural Benchmark Dataset for SLAM Algorithms
Oct 17, 2023



This paper introduces a new benchmark dataset, Open-Structure, for evaluating visual odometry and SLAM methods, which directly equips point and line measurements, correspondences, structural associations, and co-visibility factor graphs instead of providing raw images. Based on the proposed benchmark dataset, these 2D or 3D data can be directly input to different stages of SLAM pipelines to avoid the impact of the data preprocessing modules in ablation experiments. First, we propose a dataset generator for real-world and simulated scenarios. In real-world scenes, it maintains the same observations and occlusions as actual feature extraction results. Those generated simulation sequences enhance the dataset's diversity by introducing various carefully designed trajectories and observations. Second, a SLAM baseline is proposed using our dataset to evaluate widely used modules in camera pose tracking, parametrization, and optimization modules. By evaluating these state-of-the-art algorithms across different scenarios, we discern each module's strengths and weaknesses within the camera tracking and optimization process. Our dataset and baseline are available at \url{https://github.com/yanyan-li/Open-Structure}.
SRH-Net: Stacked Recurrent Hourglass Network for Stereo Matching
May 25, 2021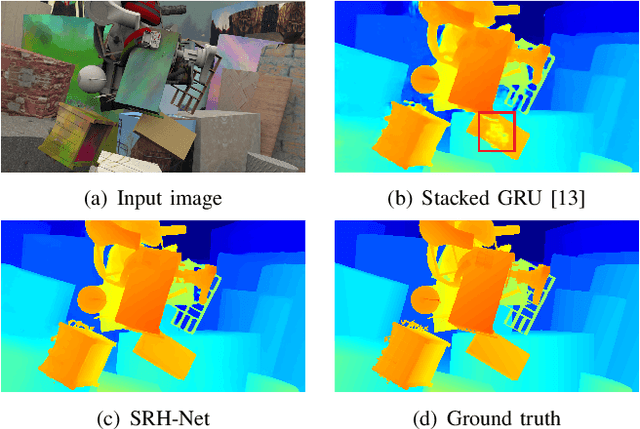
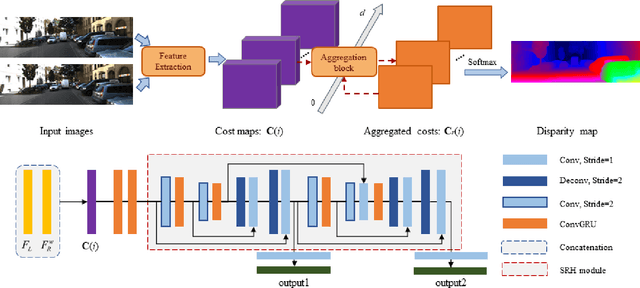
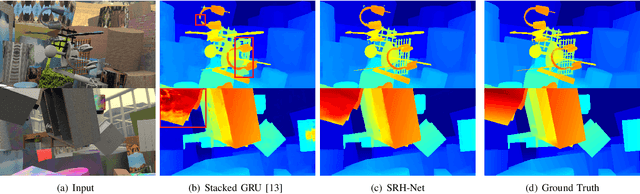
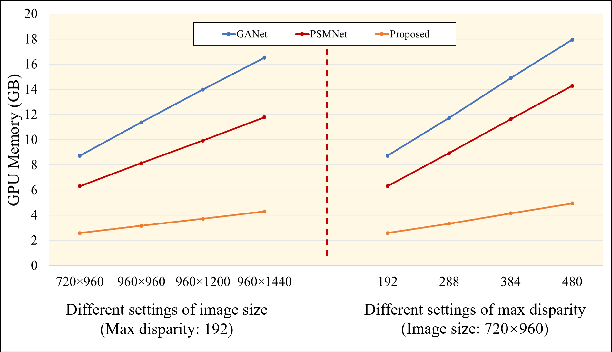
The cost aggregation strategy shows a crucial role in learning-based stereo matching tasks, where 3D convolutional filters obtain state of the art but require intensive computation resources, while 2D operations need less GPU memory but are sensitive to domain shift. In this paper, we decouple the 4D cubic cost volume used by 3D convolutional filters into sequential cost maps along the direction of disparity instead of dealing with it at once by exploiting a recurrent cost aggregation strategy. Furthermore, a novel recurrent module, Stacked Recurrent Hourglass (SRH), is proposed to process each cost map. Our hourglass network is constructed based on Gated Recurrent Units (GRUs) and down/upsampling layers, which provides GRUs larger receptive fields. Then two hourglass networks are stacked together, while multi-scale information is processed by skip connections to enhance the performance of the pipeline in textureless areas. The proposed architecture is implemented in an end-to-end pipeline and evaluated on public datasets, which reduces GPU memory consumption by up to 56.1\% compared with PSMNet using stacked hourglass 3D CNNs without the degradation of accuracy. Then, we further demonstrate the scalability of the proposed method on several high-resolution pairs, while previously learned approaches often fail due to the memory constraint. The code is released at \url{https://github.com/hongzhidu/SRHNet}.