 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHierarchical Topometric Representation of 3D Robotic Maps
Nov 24, 2021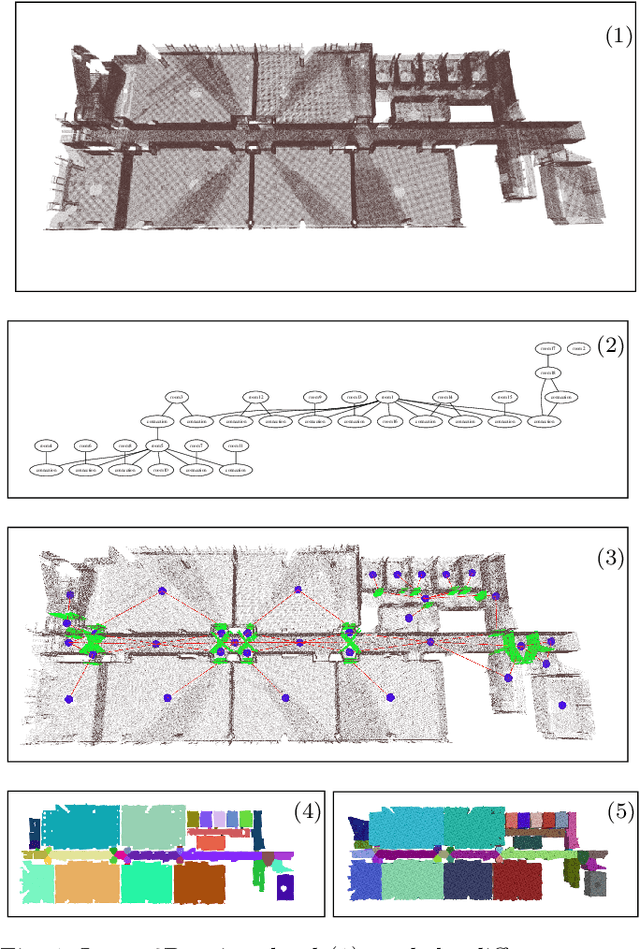
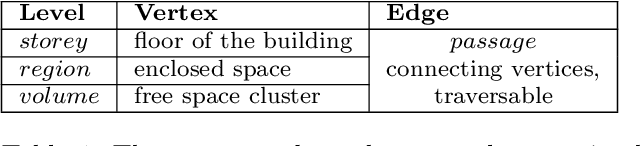
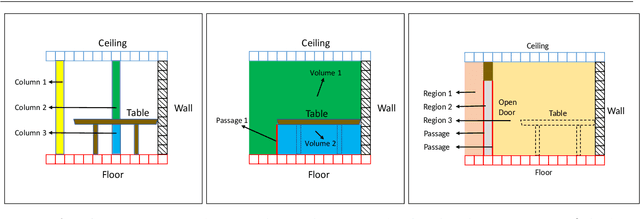
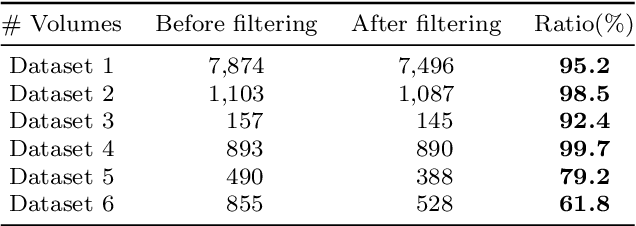
In this paper, we propose a method for generating a hierarchical, volumetric topological map from 3D point clouds. There are three basic hierarchical levels in our map: $storey - region - volume$. The advantages of our method are reflected in both input and output. In terms of input, we accept multi-storey point clouds and building structures with sloping roofs or ceilings. In terms of output, we can generate results with metric information of different dimensionality, that are suitable for different robotics applications. The algorithm generates the volumetric representation by generating $volumes$ from a 3D voxel occupancy map. We then add $passage$s (connections between $volumes$), combine small $volumes$ into a big $region$ and use a 2D segmentation method for better topological representation. We evaluate our method on several freely available datasets. The experiments highlight the advantages of our approach.
* Temporarily