 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAssistive Control of Knee Exoskeletons for Human Walking on Granular Terrains
Nov 18, 2024



Human walkers traverse diverse environments and demonstrate different gait locomotion and energy cost on granular terrains compared to solid ground. We present a stiffness-based model predictive control approach of knee exoskeleton assistance on sand. The gait and locomotion comparison is first discussed for human walkers on sand and solid ground. A machine learning-based estimation scheme is then presented to predict the ground reaction forces (GRFs) for human walkers on different terrains in real time. Built on the estimated GRFs and human joint torques, a knee exoskeleton controller is designed to provide assistive torque through a model predictive stiffness control scheme. We conduct indoor and outdoor experiments to validate the modeling and control design and their performance. The experiments demonstrate the major muscle activation and metabolic reductions by respectively 15% and 3.7% under the assistive exoskeleton control of human walking on sand.
Biomechanical Comparison of Human Walking Locomotion on Solid Ground and Sand
Mar 06, 2024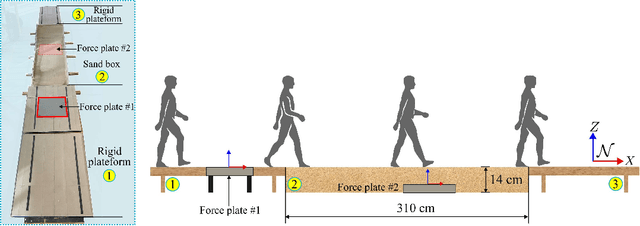
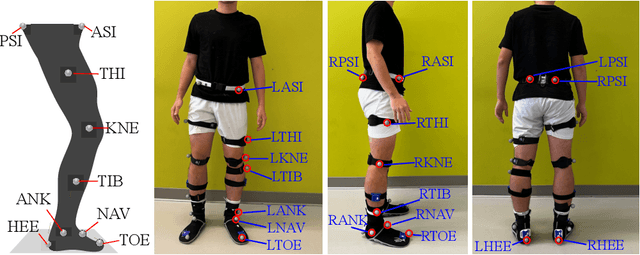
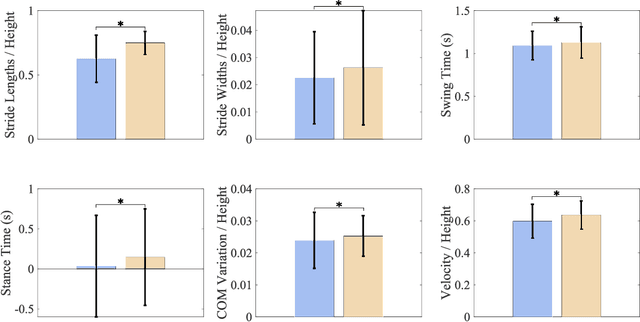
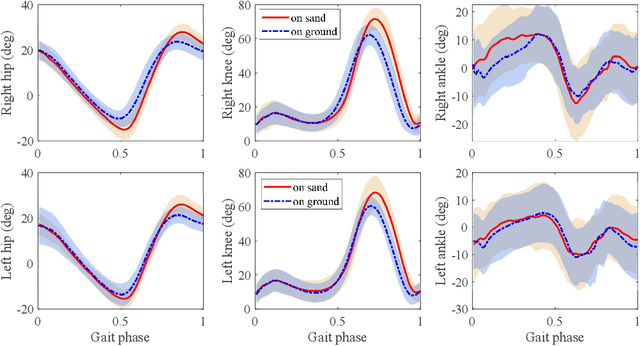
Current studies on human locomotion focus mainly on solid ground walking conditions. In this paper, we present a biomechanic comparison of human walking locomotion on solid ground and sand. A novel dataset containing 3-dimensional motion and biomechanical data from 20 able-bodied adults for locomotion on solid ground and sand is collected. We present the data collection methods and report the sensor data along with the kinematic and kinetic profiles of joint biomechanics. A comprehensive analysis of human gait and joint stiffness profiles is presented. The kinematic and kinetic analysis reveals that human walking locomotion on sand shows different ground reaction forces and joint torque profiles, compared with those patterns from walking on solid ground. These gait differences reflect that humans adopt motion control strategies for yielding terrain conditions such as sand. The dataset also provides a source of locomotion data for researchers to study human activity recognition and assistive devices for walking on different terrains.
Foot Shape-Dependent Resistive Force Model for Bipedal Walkers on Granular Terrains
Mar 06, 2024



Legged robots have demonstrated high efficiency and effectiveness in unstructured and dynamic environments. However, it is still challenging for legged robots to achieve rapid and efficient locomotion on deformable, yielding substrates, such as granular terrains. We present an enhanced resistive force model for bipedal walkers on soft granular terrains by introducing effective intrusion depth correction. The enhanced force model captures fundamental kinetic results considering the robot foot shape, walking gait speed variation, and energy expense. The model is validated by extensive foot intrusion experiments with a bipedal robot. The results confirm the model accuracy on the given type of granular terrains. The model can be further integrated with the motion control of bipedal robotic walkers.
A Reduced-Order Resistive Force Model for Robotic Foot-Mud Interactions
Mar 05, 2024Legged robots are well-suited for broad exploration tasks in complex environments with yielding terrain. Understanding robotic foot-terrain interactions is critical for safe locomotion and walking efficiency for legged robots. This paper presents a reduced-order resistive-force model for robotic-foot/mud interactions. We focus on vertical robot locomotion on mud and propose a visco-elasto-plastic analog to model the foot/mud interaction forces. Dynamic behaviors such as mud visco-elasticity, withdrawing cohesive suction, and yielding are explicitly discussed with the proposed model. Besides comparing with dry/wet granular materials, mud intrusion experiments are conducted to validate the force model. The dependency of the model parameter on water content and foot velocity is also studied to reveal in-depth model properties under various conditions. The proposed force model potentially provides an enabling tool for legged robot locomotion and control on muddy terrain.
Energy Efficient Foot-Shape Design for Bipedal Walkers on Granular Terrain
Sep 15, 2023



It is important to understand how bipedal walkers balance and walk effectively on granular materials, such as sand and loose dirt, etc. This paper first presents a computational approach to obtain the motion and energy analysis of bipedal walkers on granular terrains and then discusses an optimization method for the robot foot-shape contour design for energy efficiently walking. We first present the foot-terrain interaction characteristics of the intrusion process using the resistive force theory that provides comprehensive force laws. Using human gait profiles, we compute and compare the ground reaction forces and the external work for walking gaits with various foot shapes on granular terrains. A multi-objective optimization problem is finally formulated for the foot contour design considering energy saving and walking efficiency. It is interesting to find out a non-convex foot shape gives the best performance in term of energy and locomotion efficiency on hard granular terrains. The presented work provides an enabling tool to further understand and design efficient and effective bipedal walkers on granular terrains.