 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAssistive Control of Knee Exoskeletons for Human Walking on Granular Terrains
Nov 18, 2024



Human walkers traverse diverse environments and demonstrate different gait locomotion and energy cost on granular terrains compared to solid ground. We present a stiffness-based model predictive control approach of knee exoskeleton assistance on sand. The gait and locomotion comparison is first discussed for human walkers on sand and solid ground. A machine learning-based estimation scheme is then presented to predict the ground reaction forces (GRFs) for human walkers on different terrains in real time. Built on the estimated GRFs and human joint torques, a knee exoskeleton controller is designed to provide assistive torque through a model predictive stiffness control scheme. We conduct indoor and outdoor experiments to validate the modeling and control design and their performance. The experiments demonstrate the major muscle activation and metabolic reductions by respectively 15% and 3.7% under the assistive exoskeleton control of human walking on sand.
Exoskeleton-Assisted Balance and Task Evaluation During Quiet Stance and Kneeling in Construction
Aug 14, 2024Construction workers exert intense physical effort and experience serious safety and health risks in hazardous working environments. Quiet stance and kneeling are among the most common postures performed by construction workers during their daily work. This paper analyzes lower-limb joint influence on neural balance control strategies using the frequency behavior of the intersection point of ground reaction forces. To evaluate the impact of elevation and wearable knee exoskeletons on postural balance and welding task performance, we design and integrate virtual- and mixed-reality (VR/MR) to simulate elevated environments and welding tasks. A linear quadratic regulator-controlled triple- and double-link inverted pendulum model is used for balance strategy quantification in quiet stance and kneeling, respectively. Extensive multi-subject experiments are conducted to evaluate the usability of occupational exoskeletons in destabilizing construction environments. The quantified balance strategies capture the significance of knee joint during balance control of quiet stance and kneeling gaits. Results show that center of pressure sway area reduced up to 62% in quiet stance and 39% in kneeling for subjects tested in high-elevation VR/MR worksites when provided knee exoskeleton assistance. The comprehensive balance and multitask evaluation methodology developed aims to reveal exoskeleton design considerations to mitigate the fall risk in construction.
Biomechanical Comparison of Human Walking Locomotion on Solid Ground and Sand
Mar 06, 2024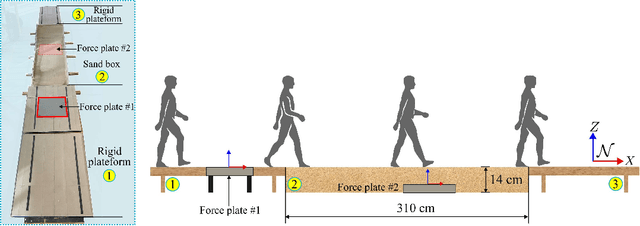
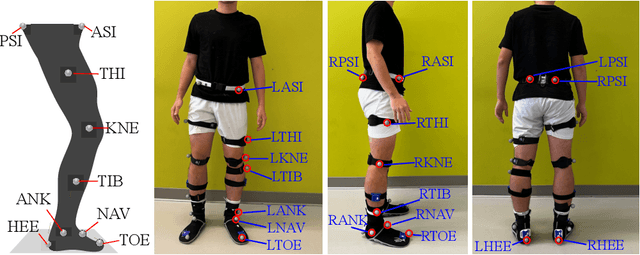
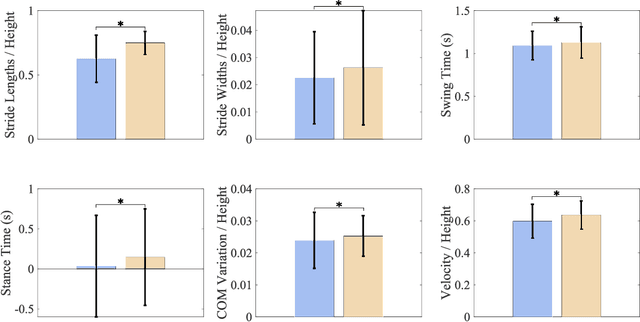
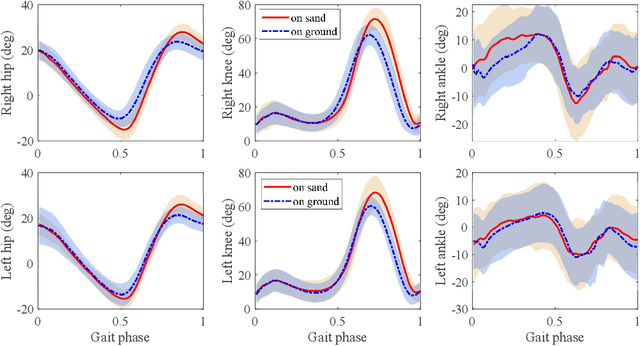
Current studies on human locomotion focus mainly on solid ground walking conditions. In this paper, we present a biomechanic comparison of human walking locomotion on solid ground and sand. A novel dataset containing 3-dimensional motion and biomechanical data from 20 able-bodied adults for locomotion on solid ground and sand is collected. We present the data collection methods and report the sensor data along with the kinematic and kinetic profiles of joint biomechanics. A comprehensive analysis of human gait and joint stiffness profiles is presented. The kinematic and kinetic analysis reveals that human walking locomotion on sand shows different ground reaction forces and joint torque profiles, compared with those patterns from walking on solid ground. These gait differences reflect that humans adopt motion control strategies for yielding terrain conditions such as sand. The dataset also provides a source of locomotion data for researchers to study human activity recognition and assistive devices for walking on different terrains.