 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDSAGL: Dual-Stream Attention-Guided Learning for Weakly Supervised Whole Slide Image Classification
May 29, 2025Whole-slide images (WSIs) are critical for cancer diagnosis due to their ultra-high resolution and rich semantic content. However, their massive size and the limited availability of fine-grained annotations pose substantial challenges for conventional supervised learning. We propose DSAGL (Dual-Stream Attention-Guided Learning), a novel weakly supervised classification framework that combines a teacher-student architecture with a dual-stream design. DSAGL explicitly addresses instance-level ambiguity and bag-level semantic consistency by generating multi-scale attention-based pseudo labels and guiding instance-level learning. A shared lightweight encoder (VSSMamba) enables efficient long-range dependency modeling, while a fusion-attentive module (FASA) enhances focus on sparse but diagnostically relevant regions. We further introduce a hybrid loss to enforce mutual consistency between the two streams. Experiments on CIFAR-10, NCT-CRC, and TCGA-Lung datasets demonstrate that DSAGL consistently outperforms state-of-the-art MIL baselines, achieving superior discriminative performance and robustness under weak supervision.
Stochastic Dynamic Power Dispatch with High Generalization and Few-Shot Adaption via Contextual Meta Graph Reinforcement Learning
Jan 19, 2024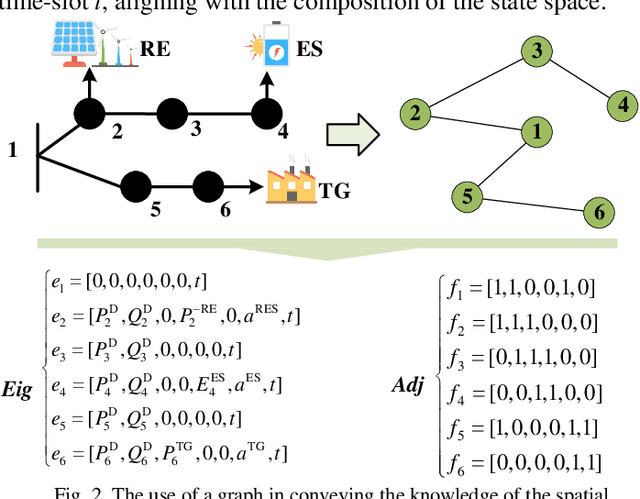
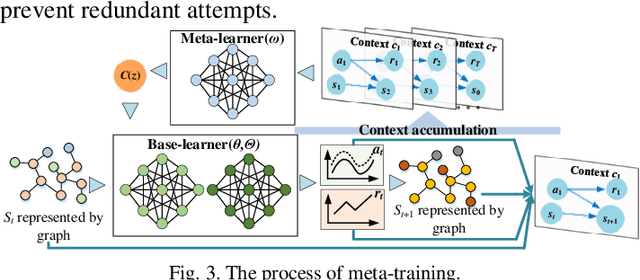
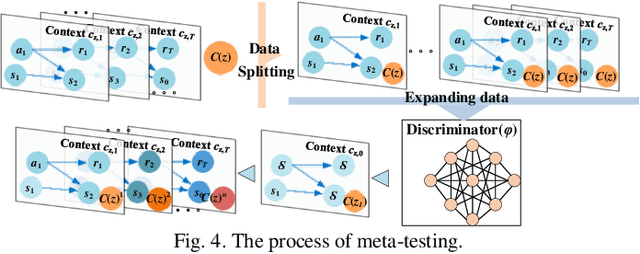
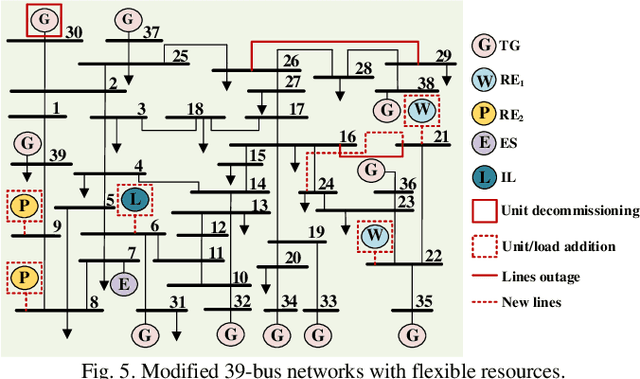
Reinforcement learning is an emerging approaches to facilitate multi-stage sequential decision-making problems. This paper studies a real-time multi-stage stochastic power dispatch considering multivariate uncertainties. Current researches suffer from low generalization and practicality, that is, the learned dispatch policy can only handle a specific dispatch scenario, its performance degrades significantly if actual samples and training samples are inconsistent. To fill these gaps, a novel contextual meta graph reinforcement learning (Meta-GRL) for a highly generalized multi-stage optimal dispatch policy is proposed. Specifically, a more general contextual Markov decision process (MDP) and scalable graph representation are introduced to achieve a more generalized multi-stage stochastic power dispatch modeling. An upper meta-learner is proposed to encode context for different dispatch scenarios and learn how to achieve dispatch task identification while the lower policy learner learns context-specified dispatch policy. After sufficient offline learning, this approach can rapidly adapt to unseen and undefined scenarios with only a few updations of the hypothesis judgments generated by the meta-learner. Numerical comparisons with state-of-the-art policies and traditional reinforcement learning verify the optimality, efficiency, adaptability, and scalability of the proposed Meta-GRL.
Conditional variational autoencoder with Gaussian process regression recognition for parametric models
May 16, 2023In this article, we present a data-driven method for parametric models with noisy observation data. Gaussian process regression based reduced order modeling (GPR-based ROM) can realize fast online predictions without using equations in the offline stage. However, GPR-based ROM does not perform well for complex systems since POD projection are naturally linear. Conditional variational autoencoder (CVAE) can address this issue via nonlinear neural networks but it has more model complexity, which poses challenges for training and tuning hyperparameters. To this end, we propose a framework of CVAE with Gaussian process regression recognition (CVAE-GPRR). The proposed method consists of a recognition model and a likelihood model. In the recognition model, we first extract low-dimensional features from data by POD to filter the redundant information with high frequency. And then a non-parametric model GPR is used to learn the map from parameters to POD latent variables, which can also alleviate the impact of noise. CVAE-GPRR can achieve the similar accuracy to CVAE but with fewer parameters. In the likelihood model, neural networks are used to reconstruct data. Besides the samples of POD latent variables and input parameters, physical variables are also added as the inputs to make predictions in the whole physical space. This can not be achieved by either GPR-based ROM or CVAE. Moreover, the numerical results show that CVAE-GPRR may alleviate the overfitting issue in CVAE.