 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScalable Indoor Novel-View Synthesis using Drone-Captured 360 Imagery with 3D Gaussian Splatting
Oct 15, 2024

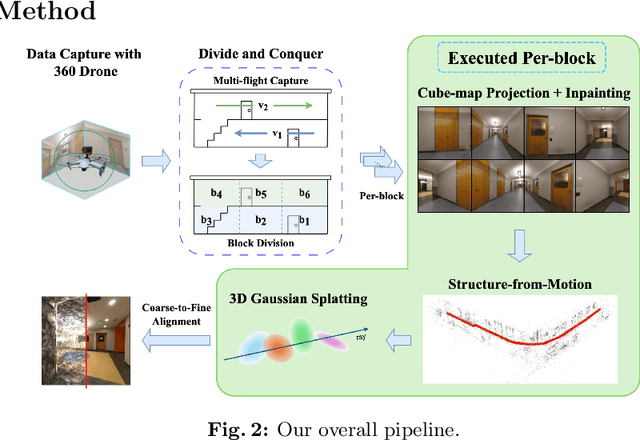
Scene reconstruction and novel-view synthesis for large, complex, multi-story, indoor scenes is a challenging and time-consuming task. Prior methods have utilized drones for data capture and radiance fields for scene reconstruction, both of which present certain challenges. First, in order to capture diverse viewpoints with the drone's front-facing camera, some approaches fly the drone in an unstable zig-zag fashion, which hinders drone-piloting and generates motion blur in the captured data. Secondly, most radiance field methods do not easily scale to arbitrarily large number of images. This paper proposes an efficient and scalable pipeline for indoor novel-view synthesis from drone-captured 360 videos using 3D Gaussian Splatting. 360 cameras capture a wide set of viewpoints, allowing for comprehensive scene capture under a simple straightforward drone trajectory. To scale our method to large scenes, we devise a divide-and-conquer strategy to automatically split the scene into smaller blocks that can be reconstructed individually and in parallel. We also propose a coarse-to-fine alignment strategy to seamlessly match these blocks together to compose the entire scene. Our experiments demonstrate marked improvement in both reconstruction quality, i.e. PSNR and SSIM, and computation time compared to prior approaches.