 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTeroSeek: An AI-Powered Knowledge Base and Retrieval Generation Platform for Terpenoid Research
May 27, 2025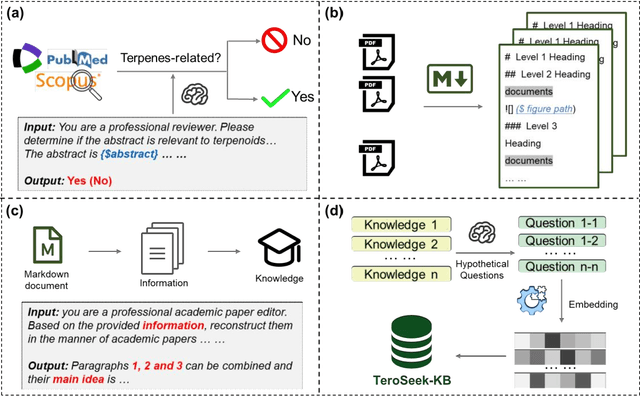
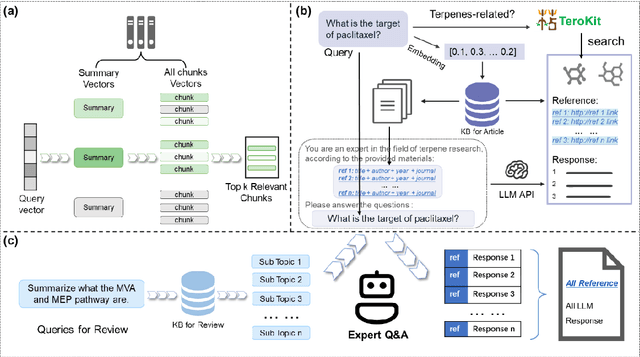
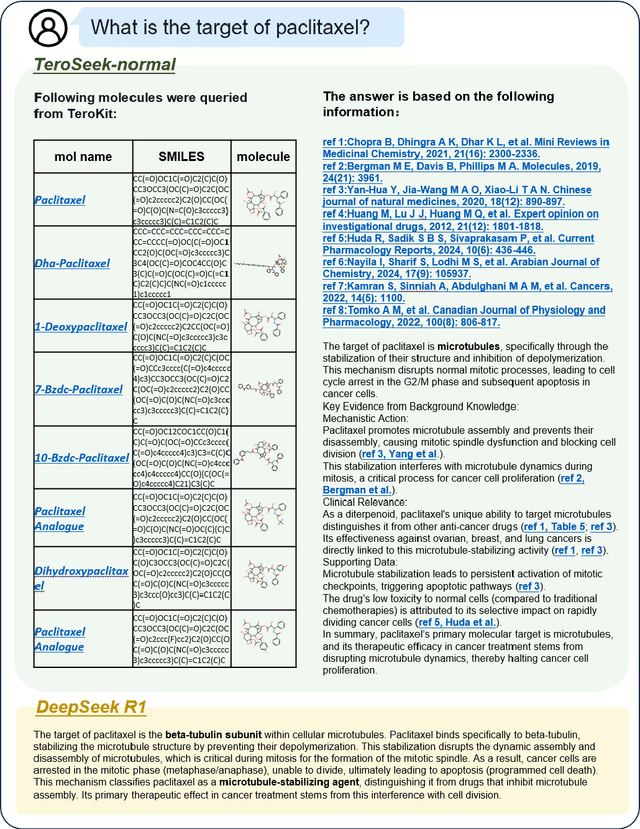
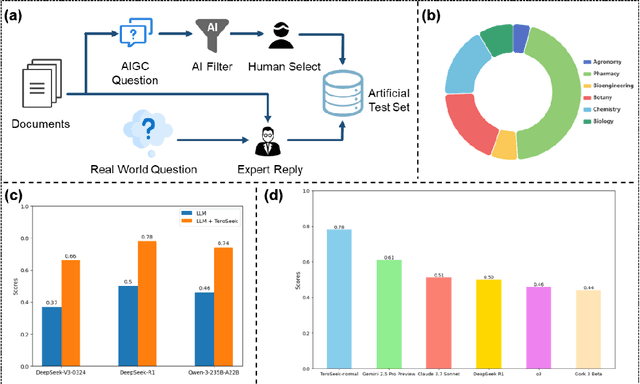
Terpenoids are a crucial class of natural products that have been studied for over 150 years, but their interdisciplinary nature (spanning chemistry, pharmacology, and biology) complicates knowledge integration. To address this, the authors developed TeroSeek, a curated knowledge base (KB) built from two decades of terpenoid literature, coupled with an AI-powered question-answering chatbot and web service. Leveraging a retrieval-augmented generation (RAG) framework, TeroSeek provides structured, high-quality information and outperforms general-purpose large language models (LLMs) in terpenoid-related queries. It serves as a domain-specific expert tool for multidisciplinary research and is publicly available at http://teroseek.qmclab.com.
Task-Oriented Image Transmission for Scene Classification in Unmanned Aerial Systems
Dec 21, 2021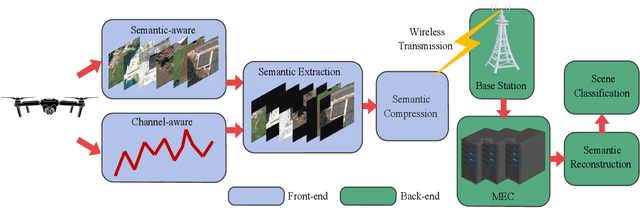
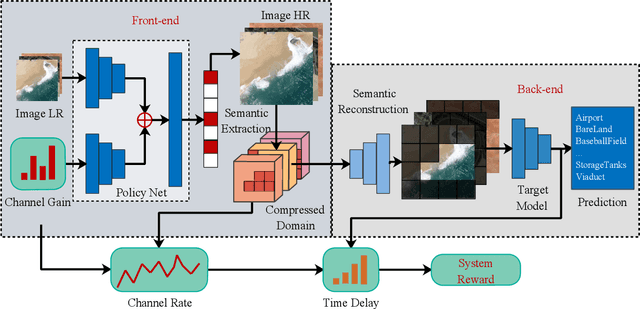
The vigorous developments of Internet of Things make it possible to extend its computing and storage capabilities to computing tasks in the aerial system with collaboration of cloud and edge, especially for artificial intelligence (AI) tasks based on deep learning (DL). Collecting a large amount of image/video data, Unmanned aerial vehicles (UAVs) can only handover intelligent analysis tasks to the back-end mobile edge computing (MEC) server due to their limited storage and computing capabilities. How to efficiently transmit the most correlated information for the AI model is a challenging topic. Inspired by the task-oriented communication in recent years, we propose a new aerial image transmission paradigm for the scene classification task. A lightweight model is developed on the front-end UAV for semantic blocks transmission with perception of images and channel conditions. In order to achieve the tradeoff between transmission latency and classification accuracy, deep reinforcement learning (DRL) is used to explore the semantic blocks which have the best contribution to the back-end classifier under various channel conditions. Experimental results show that the proposed method can significantly improve classification accuracy compared to the fixed transmission strategy and traditional content perception methods.
Self-Selective Correlation Ship Tracking Method for Smart Ocean System
Feb 26, 2019



In recent years, with the development of the marine industry, navigation environment becomes more complicated. Some artificial intelligence technologies, such as computer vision, can recognize, track and count the sailing ships to ensure the maritime security and facilitates the management for Smart Ocean System. Aiming at the scaling problem and boundary effect problem of traditional correlation filtering methods, we propose a self-selective correlation filtering method based on box regression (BRCF). The proposed method mainly include: 1) A self-selective model with negative samples mining method which effectively reduces the boundary effect in strengthening the classification ability of classifier at the same time; 2) A bounding box regression method combined with a key points matching method for the scale prediction, leading to a fast and efficient calculation. The experimental results show that the proposed method can effectively deal with the problem of ship size changes and background interference. The success rates and precisions were higher than Discriminative Scale Space Tracking (DSST) by over 8 percentage points on the marine traffic dataset of our laboratory. In terms of processing speed, the proposed method is higher than DSST by nearly 22 Frames Per Second (FPS).