 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast and Accurate Multi-Agent Trajectory Prediction For Crowded Unknown Scenes
Jul 12, 2024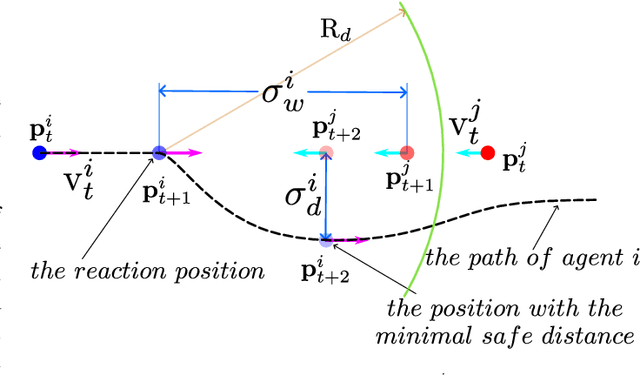

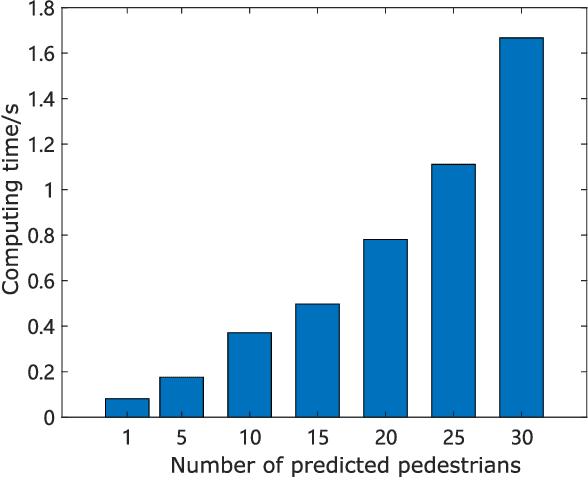
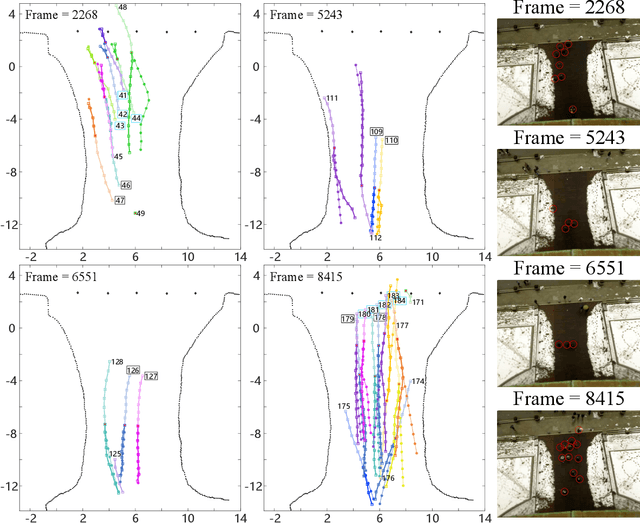
This paper studies the problem of multi-agent trajectory prediction in crowded unknown environments. A novel energy function optimization-based framework is proposed to generate prediction trajectories. Firstly, a new energy function is designed for easier optimization. Secondly, an online optimization pipeline for calculating parameters and agents' velocities is developed. In this pipeline, we first design an efficient group division method based on Frechet distance to classify agents online. Then the strategy on decoupling the optimization of velocities and critical parameters in the energy function is developed, where the the slap swarm algorithm and gradient descent algorithms are integrated to solve the optimization problems more efficiently. Thirdly, we propose a similarity-based resample evaluation algorithm to predict agents' optimal goals, defined as the target-moving headings of agents, which effectively extracts hidden information in observed states and avoids learning agents' destinations via the training dataset in advance. Experiments and comparison studies verify the advantages of the proposed method in terms of prediction accuracy and speed.