 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBit-by-Bit: Progressive QAT Strategy with Outlier Channel Splitting for Stable Low-Bit LLMs
Apr 09, 2026Training LLMs at ultra-low precision remains a formidable challenge. Direct low-bit QAT often suffers from convergence instability and substantial training costs, exacerbated by quantization noise from heavy-tailed outlier channels and error accumulation across layers. To address these issues, we present Bit-by-Bit, a progressive QAT framework with outlier channel splitting. Our approach integrates three key components: (1) block-wise progressive training that reduces precision stage by stage, ensuring stable initialization for low-bit optimization; (2) nested structure of integer quantization grids to enable a "train once, deploy any precision" paradigm, allowing a single model to support multiple bit-widths without retraining; (3) rounding-aware outlier channel splitting, which mitigates quantization error while acting as an identity transform that preserves the quantized outputs. Furthermore, we follow microscaling groups with E4M3 scales, capturing dynamic activation ranges in alignment with OCP/NVIDIA standards. To address the lack of efficient 2-bit kernels, we developed custom operators for both W2A2 and W2A16 configurations, achieving up to 11$\times$ speedup over BF16. Under W2A2 settings, Bit-by-Bit significantly outperforms baselines like BitDistiller and EfficientQAT on both Llama2/3, achieving a loss of only 2.25 WikiText2 PPL compared to full-precision models.
QaRL: Rollout-Aligned Quantization-Aware RL for Fast and Stable Training under Training--Inference Mismatch
Apr 09, 2026Large language model (LLM) reinforcement learning (RL) pipelines are often bottlenecked by rollout generation, making end-to-end training slow. Recent work mitigates this by running rollouts with quantization to accelerate decoding, which is the most expensive stage of the RL loop. However, these setups destabilize optimization by amplifying the training-inference gap: rollouts are operated at low precision, while learning updates are computed at full precision. To address this challenge, we propose QaRL (Rollout Alignment Quantization-Aware RL), which aligns training-side forward with the quantized rollout to minimize mismatch. We further identify a failure mode in quantized rollouts: long-form responses tend to produce repetitive, garbled tokens (error tokens). To mitigate these problems, we introduce TBPO (Trust-Band Policy Optimization), a sequence-level objective with dual clipping for negative samples, aimed at keeping updates within the trust region. On Qwen3-30B-A3B MoE for math problems, QaRL outperforms quantized-rollout training by +5.5 while improving stability and preserving low-bit throughput benefits.
Differentiable Skill Optimisation for Powder Manipulation in Laboratory Automation
Oct 01, 2025Robotic automation is accelerating scientific discovery by reducing manual effort in laboratory workflows. However, precise manipulation of powders remains challenging, particularly in tasks such as transport that demand accuracy and stability. We propose a trajectory optimisation framework for powder transport in laboratory settings, which integrates differentiable physics simulation for accurate modelling of granular dynamics, low-dimensional skill-space parameterisation to reduce optimisation complexity, and a curriculum-based strategy that progressively refines task competence over long horizons. This formulation enables end-to-end optimisation of contact-rich robot trajectories while maintaining stability and convergence efficiency. Experimental results demonstrate that the proposed method achieves superior task success rates and stability compared to the reinforcement learning baseline.
Differentiable Physics-based System Identification for Robotic Manipulation of Elastoplastic Materials
Nov 01, 2024



Robotic manipulation of volumetric elastoplastic deformable materials, from foods such as dough to construction materials like clay, is in its infancy, largely due to the difficulty of modelling and perception in a high-dimensional space. Simulating the dynamics of such materials is computationally expensive. It tends to suffer from inaccurately estimated physics parameters of the materials and the environment, impeding high-precision manipulation. Estimating such parameters from raw point clouds captured by optical cameras suffers further from heavy occlusions. To address this challenge, this work introduces a novel Differentiable Physics-based System Identification (DPSI) framework that enables a robot arm to infer the physics parameters of elastoplastic materials and the environment using simple manipulation motions and incomplete 3D point clouds, aligning the simulation with the real world. Extensive experiments show that with only a single real-world interaction, the estimated parameters, Young's modulus, Poisson's ratio, yield stress and friction coefficients, can accurately simulate visually and physically realistic deformation behaviours induced by unseen and long-horizon manipulation motions. Additionally, the DPSI framework inherently provides physically intuitive interpretations for the parameters in contrast to black-box approaches such as deep neural networks.
AutomaChef: A Physics-informed Demonstration-guided Learning Framework for Granular Material Manipulation
Jun 13, 2024Due to the complex physical properties of granular materials, research on robot learning for manipulating such materials predominantly either disregards the consideration of their physical characteristics or uses surrogate models to approximate their physical properties. Learning to manipulate granular materials based on physical information obtained through precise modelling remains an unsolved problem. In this paper, we propose to address this challenge by constructing a differentiable physics simulator for granular materials based on the Taichi programming language and developing a learning framework accelerated by imperfect demonstrations that are generated via gradient-based optimisation on non-granular materials through our simulator. Experimental results show that our method trains three policies that, when chained, are capable of executing the task of transporting granular materials in both simulated and real-world scenarios, which existing popular deep reinforcement learning models fail to accomplish.
Recent Advances of Deep Robotic Affordance Learning: A Reinforcement Learning Perspective
Mar 10, 2023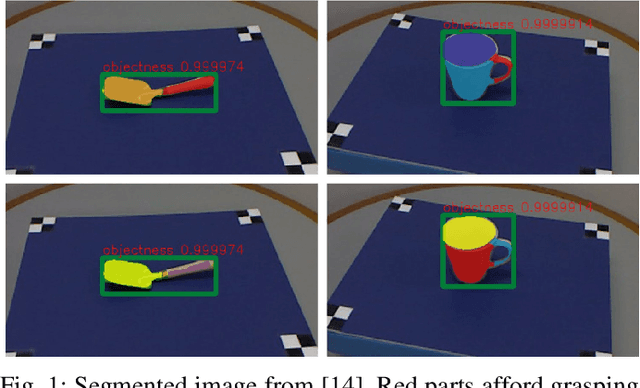
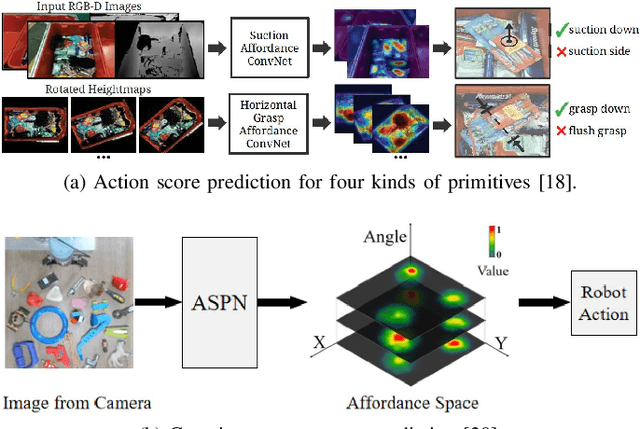
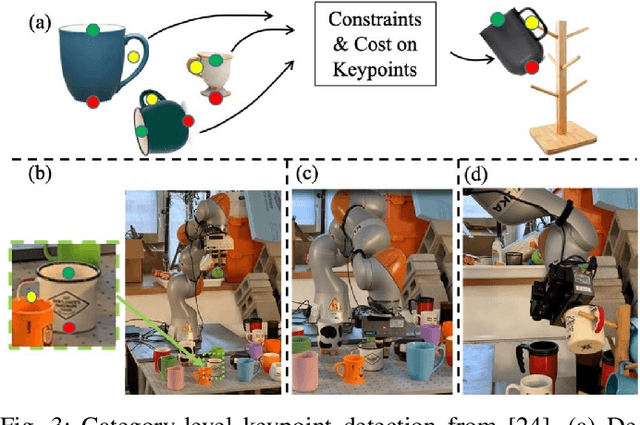
As a popular concept proposed in the field of psychology, affordance has been regarded as one of the important abilities that enable humans to understand and interact with the environment. Briefly, it captures the possibilities and effects of the actions of an agent applied to a specific object or, more generally, a part of the environment. This paper provides a short review of the recent developments of deep robotic affordance learning (DRAL), which aims to develop data-driven methods that use the concept of affordance to aid in robotic tasks. We first classify these papers from a reinforcement learning (RL) perspective, and draw connections between RL and affordances. The technical details of each category are discussed and their limitations identified. We further summarise them and identify future challenges from the aspects of observations, actions, affordance representation, data-collection and real-world deployment. A final remark is given at the end to propose a promising future direction of the RL-based affordance definition to include the predictions of arbitrary action consequences.
Abstract Demonstrations and Adaptive Exploration for Efficient and Stable Multi-step Sparse Reward Reinforcement Learning
Jul 19, 2022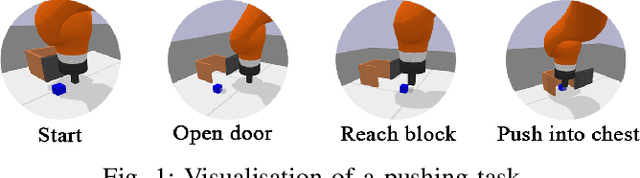
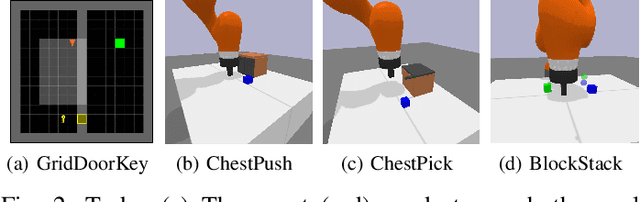
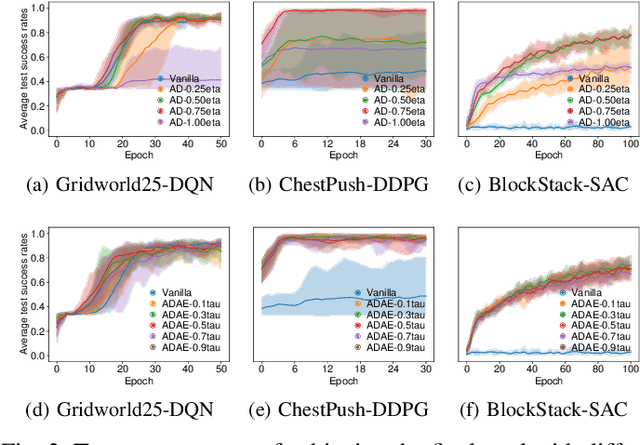
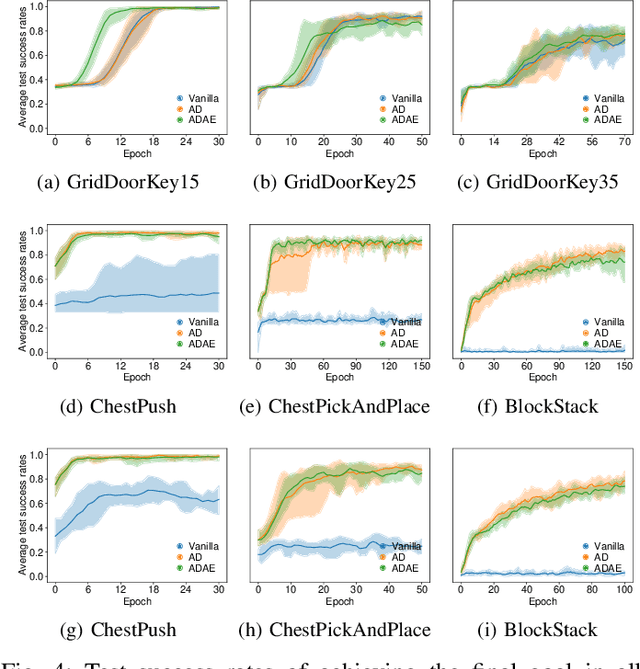
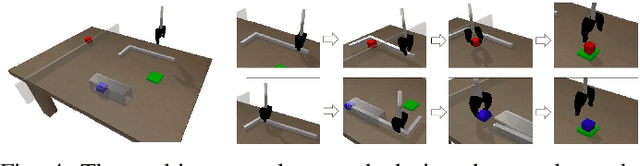
Although Deep Reinforcement Learning (DRL) has been popular in many disciplines including robotics, state-of-the-art DRL algorithms still struggle to learn long-horizon, multi-step and sparse reward tasks, such as stacking several blocks given only a task-completion reward signal. To improve learning efficiency for such tasks, this paper proposes a DRL exploration technique, termed A^2, which integrates two components inspired by human experiences: Abstract demonstrations and Adaptive exploration. A^2 starts by decomposing a complex task into subtasks, and then provides the correct orders of subtasks to learn. During training, the agent explores the environment adaptively, acting more deterministically for well-mastered subtasks and more stochastically for ill-learnt subtasks. Ablation and comparative experiments are conducted on several grid-world tasks and three robotic manipulation tasks. We demonstrate that A^2 can aid popular DRL algorithms (DQN, DDPG, and SAC) to learn more efficiently and stably in these environments.
An Open-Source Multi-Goal Reinforcement Learning Environment for Robotic Manipulation with Pybullet
May 12, 2021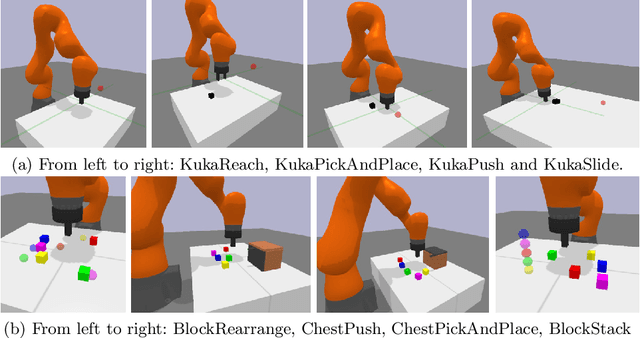
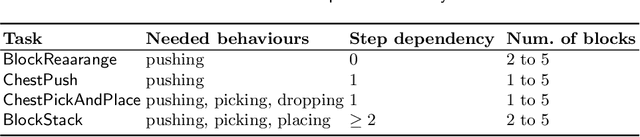
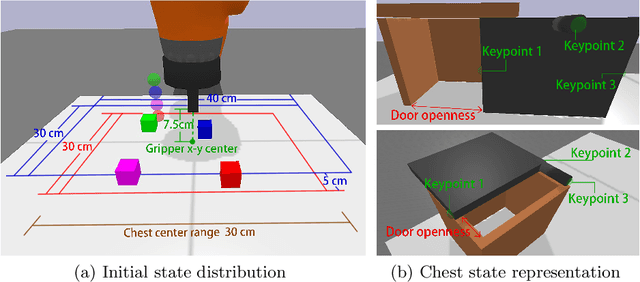
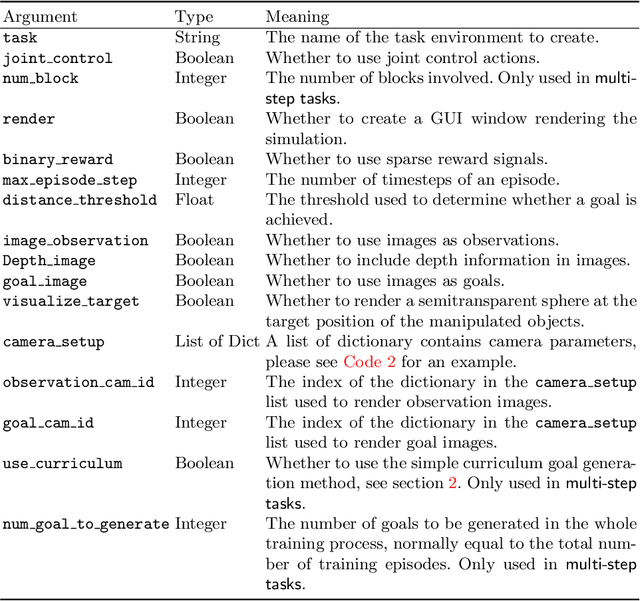
This work re-implements the OpenAI Gym multi-goal robotic manipulation environment, originally based on the commercial Mujoco engine, onto the open-source Pybullet engine. By comparing the performances of the Hindsight Experience Replay-aided Deep Deterministic Policy Gradient agent on both environments, we demonstrate our successful re-implementation of the original environment. Besides, we provide users with new APIs to access a joint control mode, image observations and goals with customisable camera and a built-in on-hand camera. We further design a set of multi-step, multi-goal, long-horizon and sparse reward robotic manipulation tasks, aiming to inspire new goal-conditioned reinforcement learning algorithms for such challenges. We use a simple, human-prior-based curriculum learning method to benchmark the multi-step manipulation tasks. Discussions about future research opportunities regarding this kind of tasks are also provided.