 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDense Dual-Path Network for Real-time Semantic Segmentation
Oct 21, 2020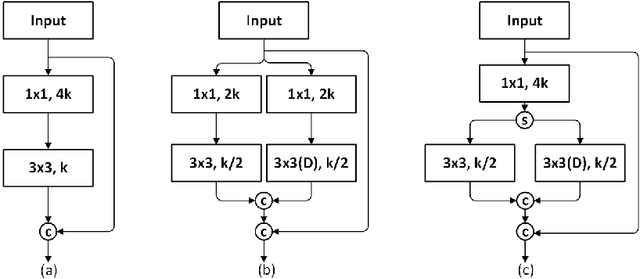
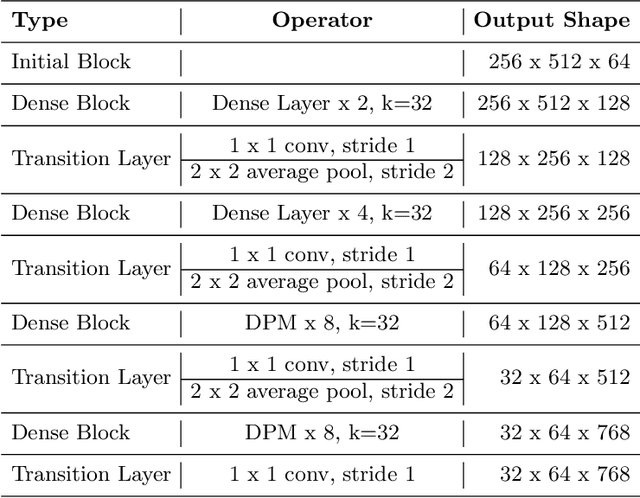
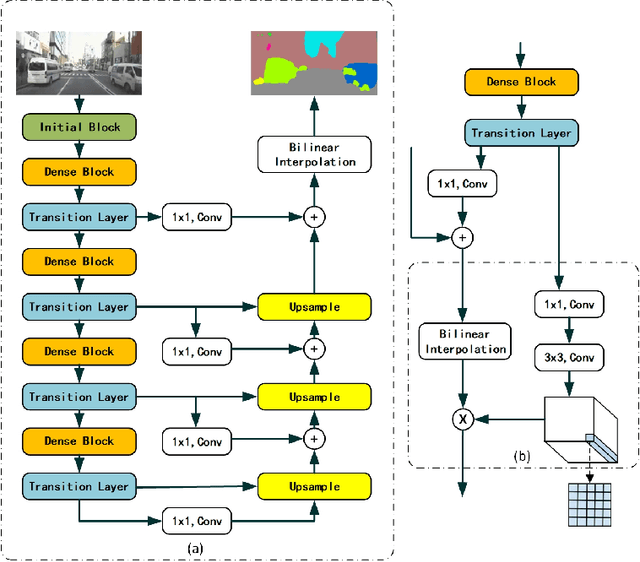
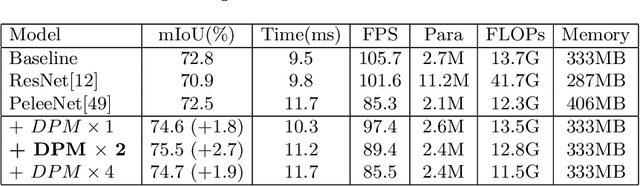
Semantic segmentation has achieved remarkable results with high computational cost and a large number of parameters. However, real-world applications require efficient inference speed on embedded devices. Most previous works address the challenge by reducing depth, width and layer capacity of network, which leads to poor performance. In this paper, we introduce a novel Dense Dual-Path Network (DDPNet) for real-time semantic segmentation under resource constraints. We design a light-weight and powerful backbone with dense connectivity to facilitate feature reuse throughout the whole network and the proposed Dual-Path module (DPM) to sufficiently aggregate multi-scale contexts. Meanwhile, a simple and effective framework is built with a skip architecture utilizing the high-resolution feature maps to refine the segmentation output and an upsampling module leveraging context information from the feature maps to refine the heatmaps. The proposed DDPNet shows an obvious advantage in balancing accuracy and speed. Specifically, on Cityscapes test dataset, DDPNet achieves 75.3% mIoU with 52.6 FPS for an input of 1024 X 2048 resolution on a single GTX 1080Ti card. Compared with other state-of-the-art methods, DDPNet achieves a significant better accuracy with a comparable speed and fewer parameters.
Real-time Multi-target Path Prediction and Planning for Autonomous Driving aided by FCN
Sep 17, 2019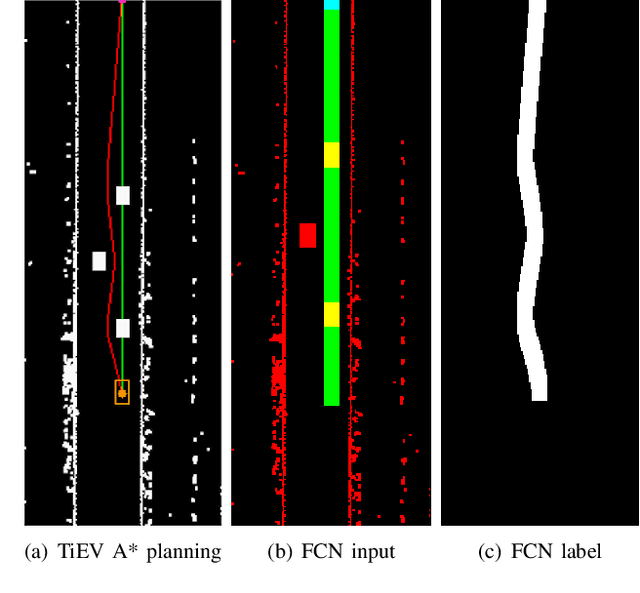
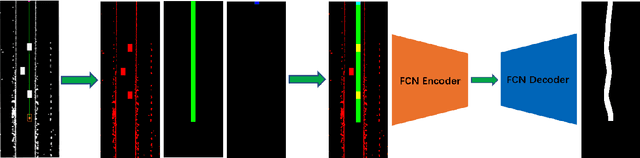
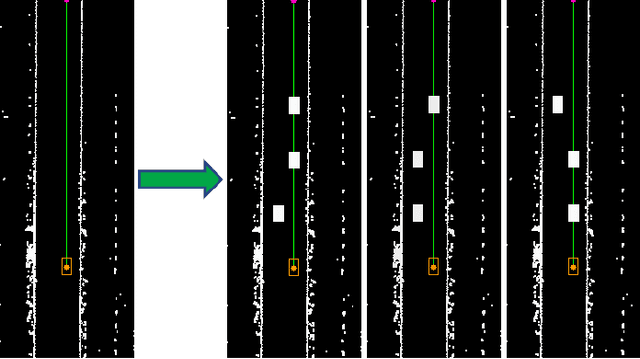
Real-time multi-target path planning is a key issue in the field of autonomous driving. Although multiple paths can be generated in real-time with polynomial curves, the generated paths are not flexible enough to deal with complex road scenes such as S-shaped road and unstructured scenes such as parking lots. Search and sampling-based methods, such as A* and RRT and their derived methods, are flexible in generating paths for these complex road environments. However, the existing algorithms require significant time to plan to multiple targets, which greatly limits their application in autonomous driving. In this paper, a real-time path planning method for multi-targets is proposed. We train a fully convolutional neural network (FCN) to predict a path region for the target at first. By taking the predicted path region as soft constraints, the A* algorithm is then applied to search the exact path to the target. Experiments show that FCN can make multiple predictions in a very short time (50 times in 40ms), and the predicted path region effectively restrict the searching space for the following A* search. Therefore, the A* can search much faster so that the multi-target path planning can be achieved in real-time (3 targets in less than 100ms).