 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeObstacle-aware Waypoint Generation for Long-range Guidance of Deep-Reinforcement-Learning-based Navigation Approaches
Sep 23, 2021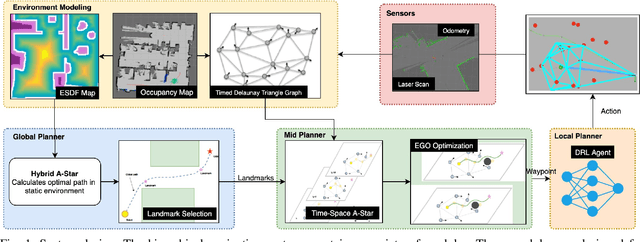
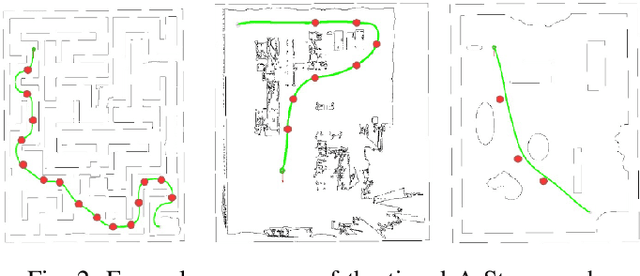
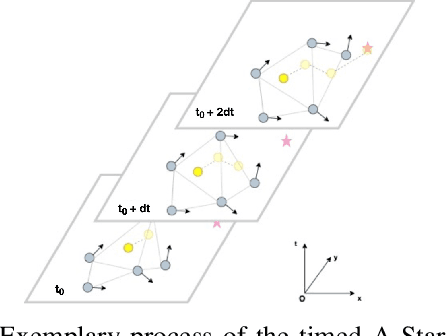
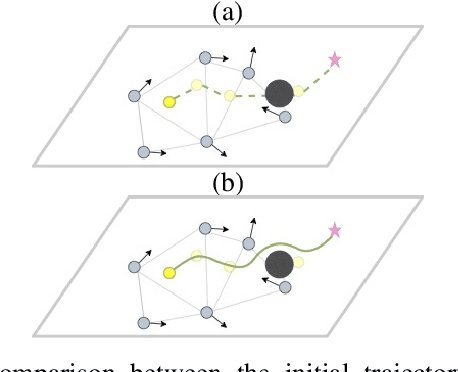
Navigation of mobile robots within crowded environments is an essential task in various use cases, such as delivery, health care, or logistics. Deep Reinforcement Learning (DRL) emerged as an alternative method to replace overly conservative approaches and promises more efficient and flexible navigation. However, Deep Reinforcement Learning is limited to local navigation due to its myopic nature. Previous research works proposed various ways to combine Deep Reinforcement Learning with conventional methods but a common problem is the complexity of highly dynamic environments due to the unpredictability of humans and other objects within the environment. In this paper, we propose a hierarchical waypoint generator, which considers moving obstacles and thus generates safer and more robust waypoints for Deep-Reinforcement-Learning-based local planners. Therefore, we utilize Delaunay Triangulation to encode obstacles and incorporate an extended hybrid A-Star approach to efficiently search for an optimal solution in the time-state space. We compared our waypoint generator against two baseline approaches and outperform them in terms of safety, efficiency, and robustness.
Connecting Deep-Reinforcement-Learning-based Obstacle Avoidance with Conventional Global Planners using Waypoint Generators
Apr 08, 2021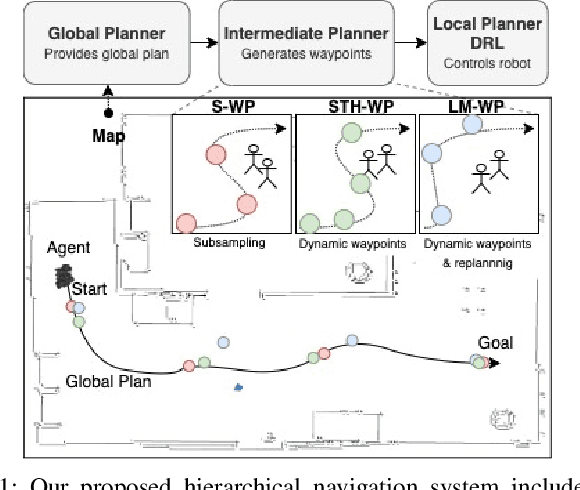
Deep Reinforcement Learning has emerged as an efficient dynamic obstacle avoidance method in highly dynamic environments. It has the potential to replace overly conservative or inefficient navigation approaches. However, the integration of Deep Reinforcement Learning into existing navigation systems is still an open frontier due to the myopic nature of Deep-Reinforcement-Learning-based navigation, which hinders its widespread integration into current navigation systems. In this paper, we propose the concept of an intermediate planner to interconnect novel Deep-Reinforcement-Learning-based obstacle avoidance with conventional global planning methods using waypoint generation. Therefore, we integrate different waypoint generators into existing navigation systems and compare the joint system against traditional ones. We found an increased performance in terms of safety, efficiency and path smoothness especially in highly dynamic environments.
Towards Deployment of Deep-Reinforcement-Learning-Based Obstacle Avoidance into Conventional Autonomous Navigation Systems
Apr 08, 2021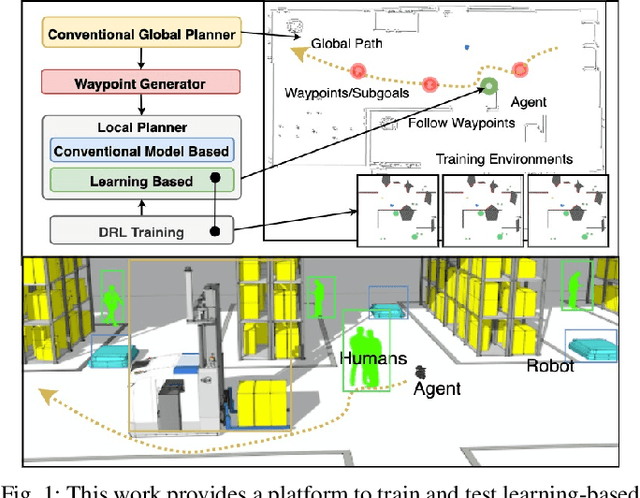
Recently, mobile robots have become important tools in various industries, especially in logistics. Deep reinforcement learning emerged as an alternative planning method to replace overly conservative approaches and promises more efficient and flexible navigation. However, deep reinforcement learning approaches are not suitable for long-range navigation due to their proneness to local minima and lack of long term memory, which hinders its widespread integration into industrial applications of mobile robotics. In this paper, we propose a navigation system incorporating deep-reinforcement-learning-based local planners into conventional navigation stacks for long-range navigation. Therefore, a framework for training and testing the deep reinforcement learning algorithms along with classic approaches is presented. We evaluated our deep-reinforcement-learning-enhanced navigation system against various conventional planners and found that our system outperforms them in terms of safety, efficiency and robustness.