 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConnecting Deep-Reinforcement-Learning-based Obstacle Avoidance with Conventional Global Planners using Waypoint Generators
Apr 08, 2021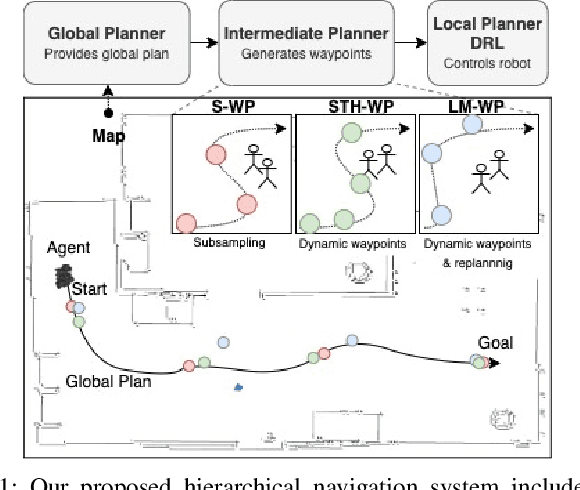
Deep Reinforcement Learning has emerged as an efficient dynamic obstacle avoidance method in highly dynamic environments. It has the potential to replace overly conservative or inefficient navigation approaches. However, the integration of Deep Reinforcement Learning into existing navigation systems is still an open frontier due to the myopic nature of Deep-Reinforcement-Learning-based navigation, which hinders its widespread integration into current navigation systems. In this paper, we propose the concept of an intermediate planner to interconnect novel Deep-Reinforcement-Learning-based obstacle avoidance with conventional global planning methods using waypoint generation. Therefore, we integrate different waypoint generators into existing navigation systems and compare the joint system against traditional ones. We found an increased performance in terms of safety, efficiency and path smoothness especially in highly dynamic environments.
Deep-Reinforcement-Learning-Based Semantic Navigation of Mobile Robots in Dynamic Environments
Aug 02, 2020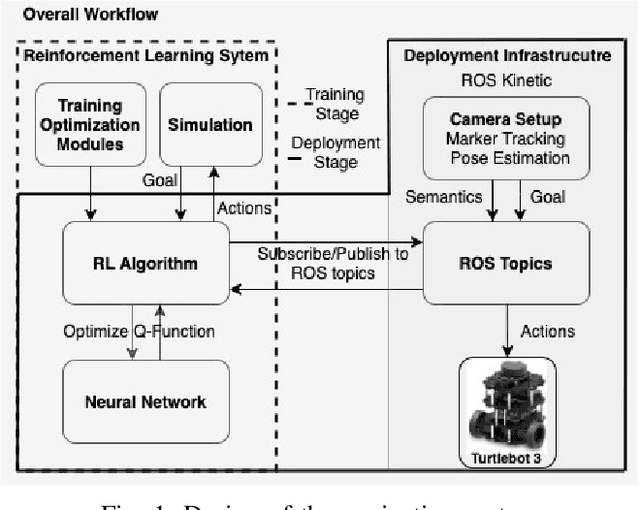
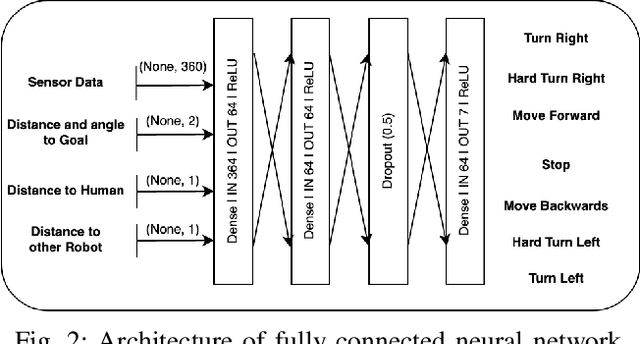
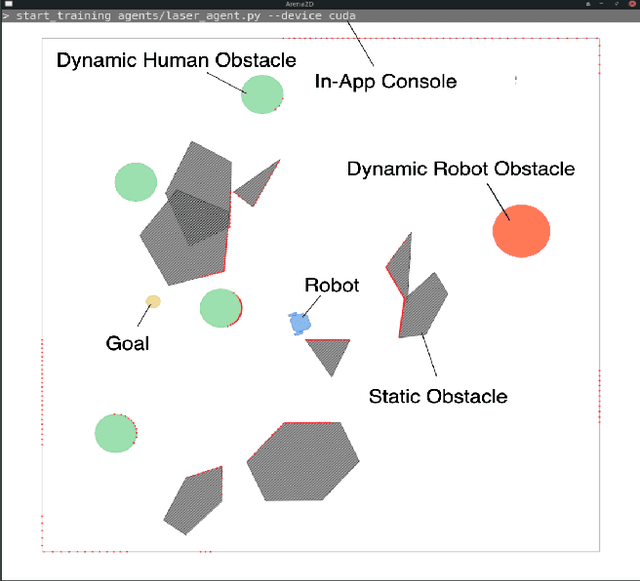
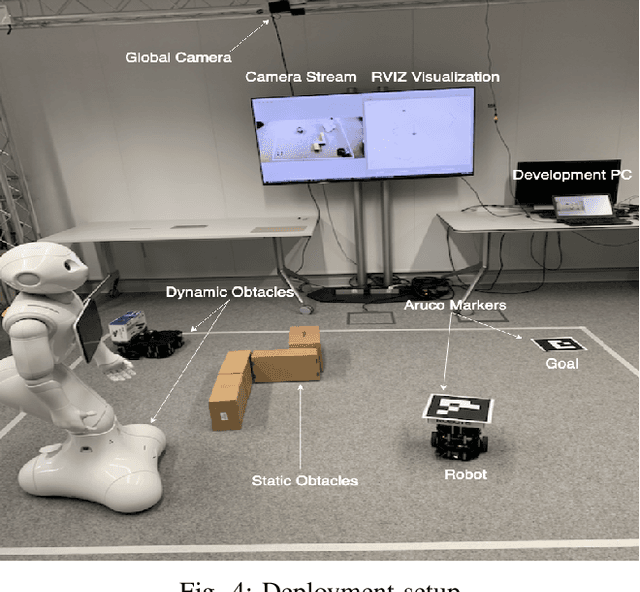
Mobile robots have gained increased importance within industrial tasks such as commissioning, delivery or operation in hazardous environments. The ability to autonomously navigate safely especially within dynamic environments, is paramount in industrial mobile robotics. Current navigation methods depend on preexisting static maps and are error-prone in dynamic environments. Furthermore, for safety reasons, they often rely on hand-crafted safety guidelines, which makes the system less flexible and slow. Visual based navigation and high level semantics bear the potential to enhance the safety of path planing by creating links the agent can reason about for a more flexible navigation. On this account, we propose a reinforcement learning based local navigation system which learns navigation behavior based solely on visual observations to cope with highly dynamic environments. Therefore, we develop a simple yet efficient simulator - ARENA2D - which is able to generate highly randomized training environments and provide semantic information to train our agent. We demonstrate enhanced results in terms of safety and robustness over a traditional baseline approach based on the dynamic window approach.
* 6 pages, 5 figures, IEEE International Conference on Automation Science and Engineering (CASE) 2020, Hong Kong