 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePoint-Calibrated Spectral Neural Operators
Oct 15, 2024Two typical neural models have been extensively studied for operator learning, learning in spatial space via attention mechanism or learning in spectral space via spectral analysis technique such as Fourier Transform. Spatial learning enables point-level flexibility but lacks global continuity constraint, while spectral learning enforces spectral continuity prior but lacks point-wise adaptivity. This work innovatively combines the continuity prior and the point-level flexibility, with the introduced Point-Calibrated Spectral Transform. It achieves this by calibrating the preset spectral eigenfunctions with the predicted point-wise frequency preference via neural gate mechanism. Beyond this, we introduce Point-Calibrated Spectral Neural Operators, which learn operator mappings by approximating functions with the point-level adaptive spectral basis, thereby not only preserving the benefits of spectral prior but also boasting the superior adaptability comparable to the attention mechanism. Comprehensive experiments demonstrate its consistent performance enhancement in extensive PDE solving scenarios.
DeltaPhi: Learning Physical Trajectory Residual for PDE Solving
Jun 14, 2024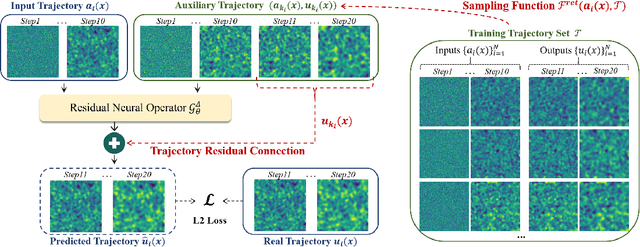
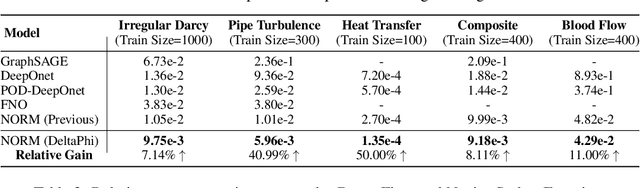
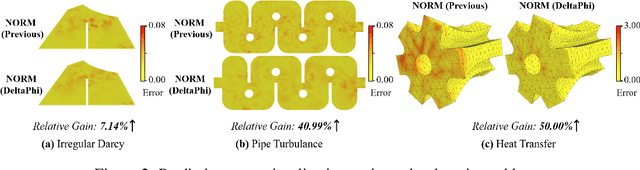
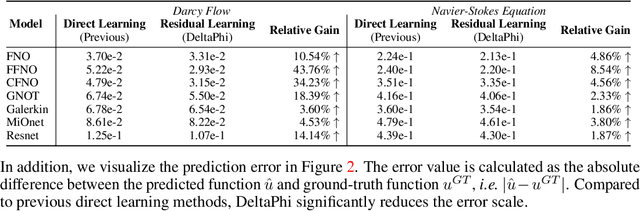
Although neural operator networks theoretically approximate any operator mapping, the limited generalization capability prevents them from learning correct physical dynamics when potential data biases exist, particularly in the practical PDE solving scenario where the available data amount is restricted or the resolution is extremely low. To address this issue, we propose and formulate the Physical Trajectory Residual Learning (DeltaPhi), which learns to predict the physical residuals between the pending solved trajectory and a known similar auxiliary trajectory. First, we transform the direct operator mapping between input-output function fields in original training data to residual operator mapping between input function pairs and output function residuals. Next, we learn the surrogate model for the residual operator mapping based on existing neural operator networks. Additionally, we design helpful customized auxiliary inputs for efficient optimization. Through extensive experiments, we conclude that, compared to direct learning, physical residual learning is preferred for PDE solving.
FragRel: Exploiting Fragment-level Relations in the External Memory of Large Language Models
Jun 05, 2024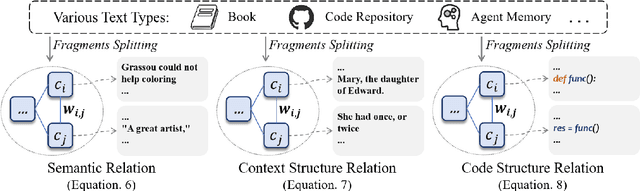
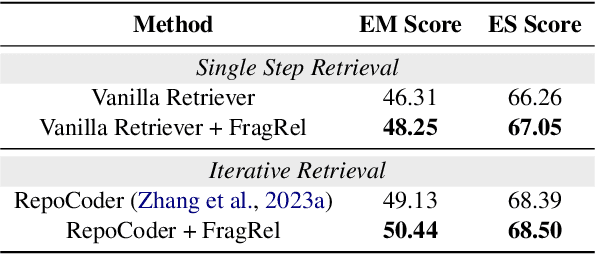
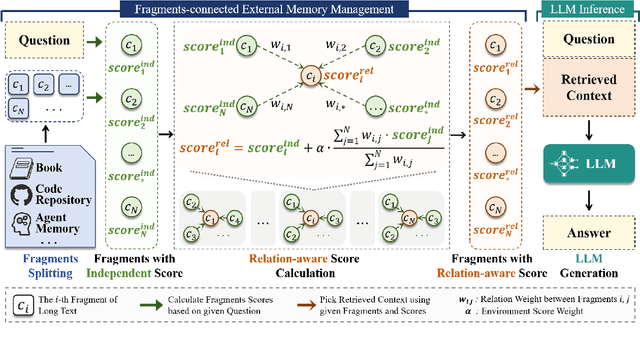
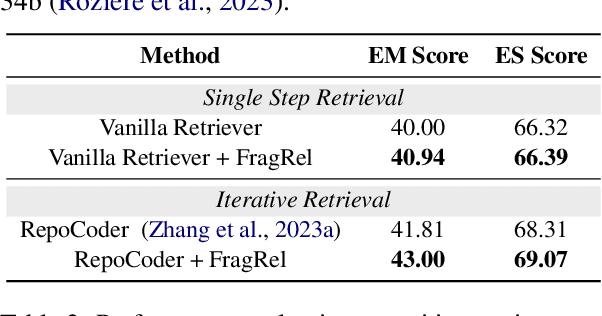
To process contexts with unlimited length using Large Language Models (LLMs), recent studies explore hierarchically managing the long text. Only several text fragments are taken from the external memory and passed into the temporary working memory, i.e., LLM's context window. However, existing approaches isolatedly handle the text fragments without considering their structural connections, thereby suffering limited capability on texts with intensive inter-relations, e.g., coherent stories and code repositories. This work attempts to resolve this by exploiting the fragment-level relations in external memory. First, we formulate the fragment-level relations and present several instantiations for different text types. Next, we introduce a relation-aware fragment assessment criteria upon previous independent fragment assessment. Finally, we present the fragment-connected Hierarchical Memory based LLM. We validate the benefits of involving these relations on long story understanding, repository-level code generation, and long-term chatting.
Efficient Emotional Adaptation for Audio-Driven Talking-Head Generation
Sep 10, 2023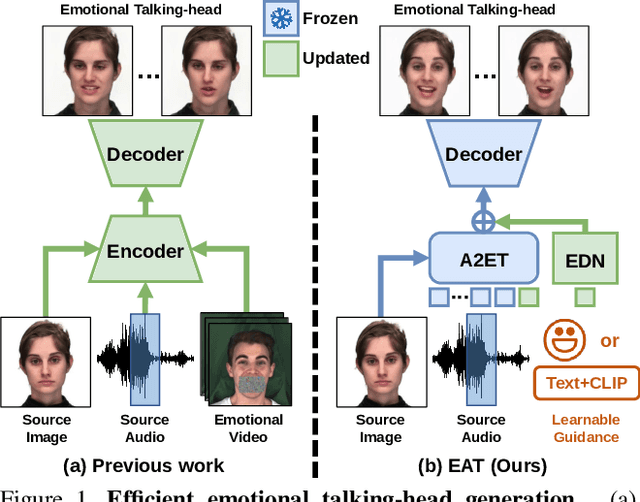
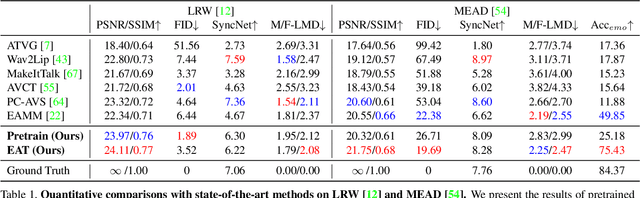
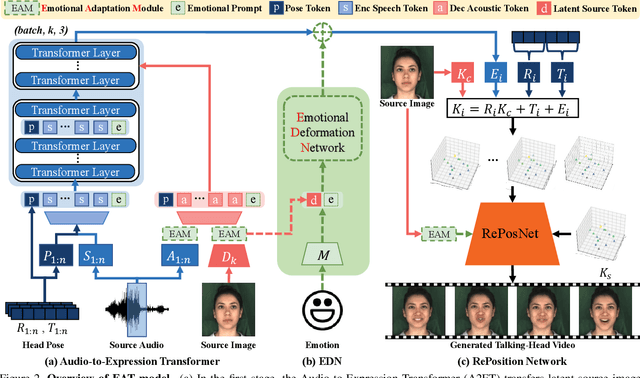
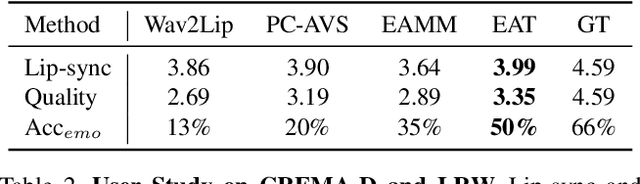
Audio-driven talking-head synthesis is a popular research topic for virtual human-related applications. However, the inflexibility and inefficiency of existing methods, which necessitate expensive end-to-end training to transfer emotions from guidance videos to talking-head predictions, are significant limitations. In this work, we propose the Emotional Adaptation for Audio-driven Talking-head (EAT) method, which transforms emotion-agnostic talking-head models into emotion-controllable ones in a cost-effective and efficient manner through parameter-efficient adaptations. Our approach utilizes a pretrained emotion-agnostic talking-head transformer and introduces three lightweight adaptations (the Deep Emotional Prompts, Emotional Deformation Network, and Emotional Adaptation Module) from different perspectives to enable precise and realistic emotion controls. Our experiments demonstrate that our approach achieves state-of-the-art performance on widely-used benchmarks, including LRW and MEAD. Additionally, our parameter-efficient adaptations exhibit remarkable generalization ability, even in scenarios where emotional training videos are scarce or nonexistent. Project website: https://yuangan.github.io/eat/