 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImpact of Static Friction on Sim2Real in Robotic Reinforcement Learning
Mar 03, 2025



In robotic reinforcement learning, the Sim2Real gap remains a critical challenge. However, the impact of Static friction on Sim2Real has been underexplored. Conventional domain randomization methods typically exclude Static friction from their parameter space. In our robotic reinforcement learning task, such conventional domain randomization approaches resulted in significantly underperforming real-world models. To address this Sim2Real challenge, we employed Actuator Net as an alternative to conventional domain randomization. While this method enabled successful transfer to flat-ground locomotion, it failed on complex terrains like stairs. To further investigate physical parameters affecting Sim2Real in robotic joints, we developed a control-theoretic joint model and performed systematic parameter identification. Our analysis revealed unexpectedly high friction-torque ratios in our robotic joints. To mitigate its impact, we implemented Static friction-aware domain randomization for Sim2Real. Recognizing the increased training difficulty introduced by friction modeling, we proposed a simple and novel solution to reduce learning complexity. To validate this approach, we conducted comprehensive Sim2Sim and Sim2Real experiments comparing three methods: conventional domain randomization (without Static friction), Actuator Net, and our Static friction-aware domain randomization. All experiments utilized the Rapid Motor Adaptation (RMA) algorithm. Results demonstrated that our method achieved superior adaptive capabilities and overall performance.
Catching Spinning Table Tennis Balls in Simulation with End-to-End Curriculum Reinforcement Learning
Mar 03, 2025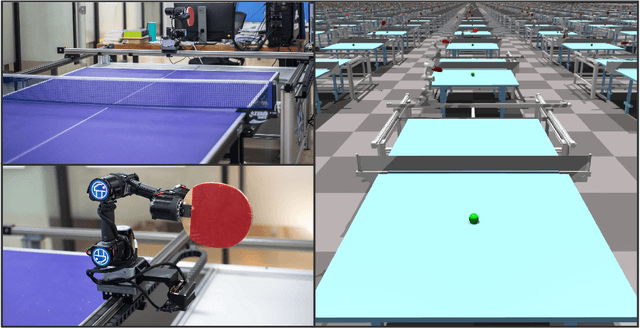



The game of table tennis is renowned for its extremely high spin rate, but most table tennis robots today struggle to handle balls with such rapid spin. To address this issue, we have contributed a series of methods, including: 1. Curriculum Reinforcement Learning (RL): This method helps the table tennis robot learn to play table tennis progressively from easy to difficult tasks. 2. Analysis of Spinning Table Tennis Ball Collisions: We have conducted a physics-based analysis to generate more realistic trajectories of spinning table tennis balls after collision. 3. Definition of Trajectory States: The definition of trajectory states aids in setting up the reward function. 4. Selection of Valid Rally Trajectories: We have introduced a valid rally trajectory selection scheme to ensure that the robot's training is not influenced by abnormal trajectories. 5. Reality-to-Simulation (Real2Sim) Transfer: This scheme is employed to validate the trained robot's ability to handle spinning balls in real-world scenarios. With Real2Sim, the deployment costs for robotic reinforcement learning can be further reduced. Moreover, the trajectory-state-based reward function is not limited to table tennis robots; it can be generalized to a wide range of cyclical tasks. To validate our robot's ability to handle spinning balls, the Real2Sim experiments were conducted. For the specific video link of the experiment, please refer to the supplementary materials.