 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHierarchical Image-Goal Navigation in Real Crowded Scenarios
Aug 13, 2021

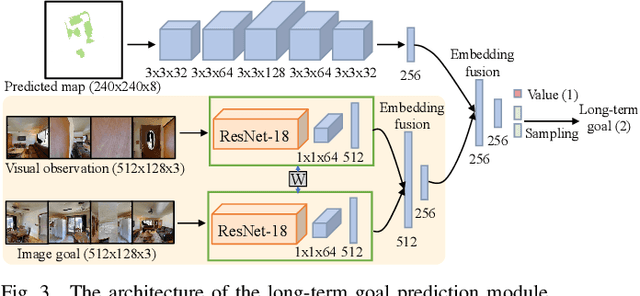

This work studies the problem of image-goal navigation, which entails guiding robots with noisy sensors and controls through real crowded environments. Recent fruitful approaches rely on deep reinforcement learning and learn navigation policies in simulation environments that are much simpler in complexity than real environments. Directly transferring these trained policies to real environments can be extremely challenging or even dangerous. We tackle this problem with a hierarchical navigation method composed of four decoupled modules. The first module maintains an obstacle map during robot navigation. The second one predicts a long-term goal on the real-time map periodically. The third one plans collision-free command sets for navigating to long-term goals, while the final module stops the robot properly near the goal image. The four modules are developed separately to suit the image-goal navigation in real crowded scenarios. In addition, the hierarchical decomposition decouples the learning of navigation goal planning, collision avoidance and navigation ending prediction, which cuts down the search space during navigation training and helps improve the generalization to previously unseen real scenes. We evaluate the method in both a simulator and the real world with a mobile robot. The results show that our method outperforms several navigation baselines and can successfully achieve navigation tasks in these scenarios.
Towards Target-Driven Visual Navigation in Indoor Scenes via Generative Imitation Learning
Sep 30, 2020

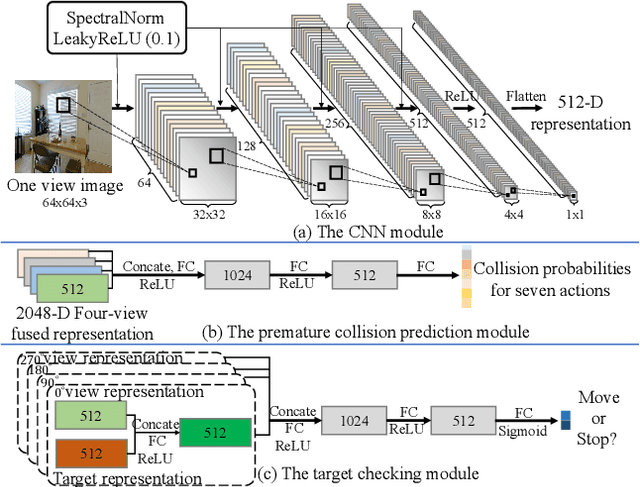

We present a target-driven navigation system to improve mapless visual navigation in indoor scenes. Our method takes a multi-view observation of a robot and a target as inputs at each time step to provide a sequence of actions that move the robot to the target without relying on odometry or GPS at runtime. The system is learned by optimizing a combinational objective encompassing three key designs. First, we propose that an agent conceives the next observation before making an action decision. This is achieved by learning a variational generative module from expert demonstrations. We then propose predicting static collision in advance, as an auxiliary task to improve safety during navigation. Moreover, to alleviate the training data imbalance problem of termination action prediction, we also introduce a target checking module to differentiate from augmenting navigation policy with a termination action. The three proposed designs all contribute to the improved training data efficiency, static collision avoidance, and navigation generalization performance, resulting in a novel target-driven mapless navigation system. Through experiments on a TurtleBot, we provide evidence that our model can be integrated into a robotic system and navigate in the real world. Videos and models can be found in the supplementary material.