 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMoETTA: Test-Time Adaptation Under Mixed Distribution Shifts with MoE-LayerNorm
Nov 14, 2025Test-Time adaptation (TTA) has proven effective in mitigating performance drops under single-domain distribution shifts by updating model parameters during inference. However, real-world deployments often involve mixed distribution shifts, where test samples are affected by diverse and potentially conflicting domain factors, posing significant challenges even for SOTA TTA methods. A key limitation in existing approaches is their reliance on a unified adaptation path, which fails to account for the fact that optimal gradient directions can vary significantly across different domains. Moreover, current benchmarks focus only on synthetic or homogeneous shifts, failing to capture the complexity of real-world heterogeneous mixed distribution shifts. To address this, we propose MoETTA, a novel entropy-based TTA framework that integrates the Mixture-of-Experts (MoE) architecture. Rather than enforcing a single parameter update rule for all test samples, MoETTA introduces a set of structurally decoupled experts, enabling adaptation along diverse gradient directions. This design allows the model to better accommodate heterogeneous shifts through flexible and disentangled parameter updates. To simulate realistic deployment conditions, we introduce two new benchmarks: potpourri and potpourri+. While classical settings focus solely on synthetic corruptions, potpourri encompasses a broader range of domain shifts--including natural, artistic, and adversarial distortions--capturing more realistic deployment challenges. Additionally, potpourri+ further includes source-domain samples to evaluate robustness against catastrophic forgetting. Extensive experiments across three mixed distribution shifts settings show that MoETTA consistently outperforms strong baselines, establishing SOTA performance and highlighting the benefit of modeling multiple adaptation directions via expert-level diversity.
The Devil is in the Details: Boosting Guided Depth Super-Resolution via Rethinking Cross-Modal Alignment and Aggregation
Jan 16, 2024Guided depth super-resolution (GDSR) involves restoring missing depth details using the high-resolution RGB image of the same scene. Previous approaches have struggled with the heterogeneity and complementarity of the multi-modal inputs, and neglected the issues of modal misalignment, geometrical misalignment, and feature selection. In this study, we rethink some essential components in GDSR networks and propose a simple yet effective Dynamic Dual Alignment and Aggregation network (D2A2). D2A2 mainly consists of 1) a dynamic dual alignment module that adapts to alleviate the modal misalignment via a learnable domain alignment block and geometrically align cross-modal features by learning the offset; and 2) a mask-to-pixel feature aggregate module that uses the gated mechanism and pixel attention to filter out irrelevant texture noise from RGB features and combine the useful features with depth features. By combining the strengths of RGB and depth features while minimizing disturbance introduced by the RGB image, our method with simple reuse and redesign of basic components achieves state-of-the-art performance on multiple benchmark datasets. The code is available at https://github.com/JiangXinni/D2A2.
Air-to-Ground Communications Beyond 5G: UAV Swarm Formation Control and Tracking
Dec 25, 2023
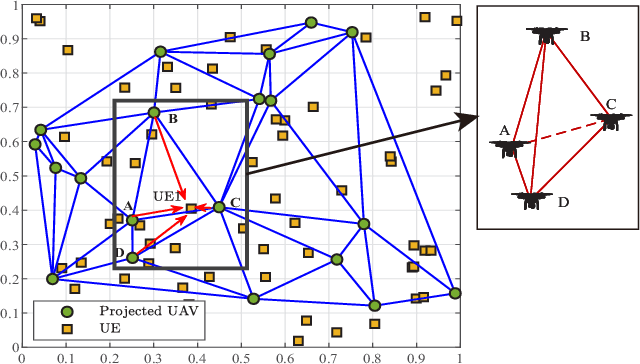
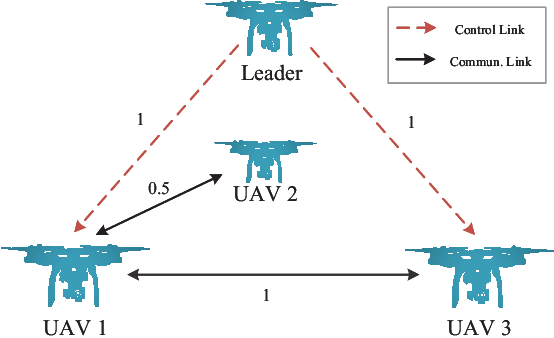
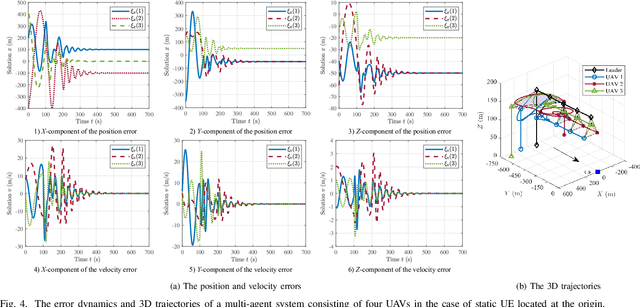
Unmanned aerial vehicle (UAV) communications have been widely accepted as promising technologies to support air-to-ground communications in the forthcoming sixth-generation (6G) wireless networks. This paper proposes a novel air-to-ground communication model consisting of aerial base stations served by UAVs and terrestrial user equipments (UEs) by integrating the technique of coordinated multi-point (CoMP) transmission with the theory of stochastic geometry. In particular, a CoMP set consisting of multiple UAVs is developed based on the theory of Poisson-Delaunay tetrahedralization. Effective UAV formation control and UAV swarm tracking schemes for two typical scenarios, including static and mobile UEs, are also developed using the multi-agent system theory to ensure that collaborative UAVs can efficiently reach target spatial positions for mission execution. Thanks to the ease of mathematical tractability, this model provides explicit performance expressions for a typical UE's coverage probability and achievable ergodic rate. Extensive simulation and numerical results corroborate that the proposed scheme outperforms UAV communications without CoMP transmission and obtains similar performance to the conventional CoMP scheme while avoiding search overhead.
SearchMorph:Multi-scale Correlation Iterative Network for Deformable Registration
Jul 04, 2022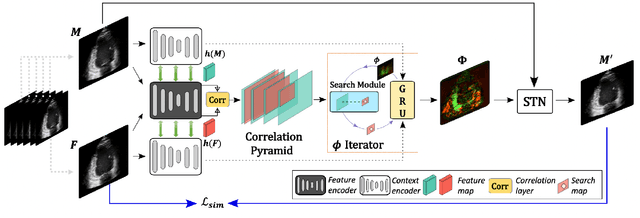
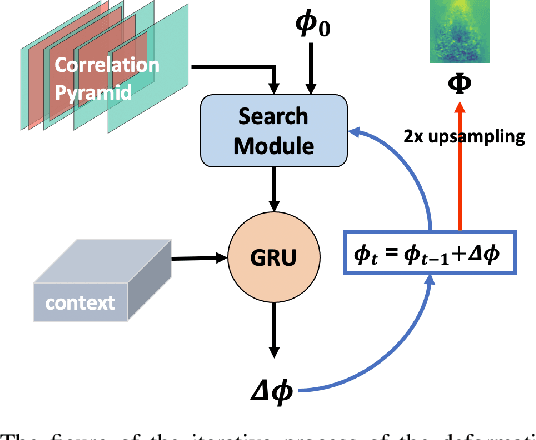
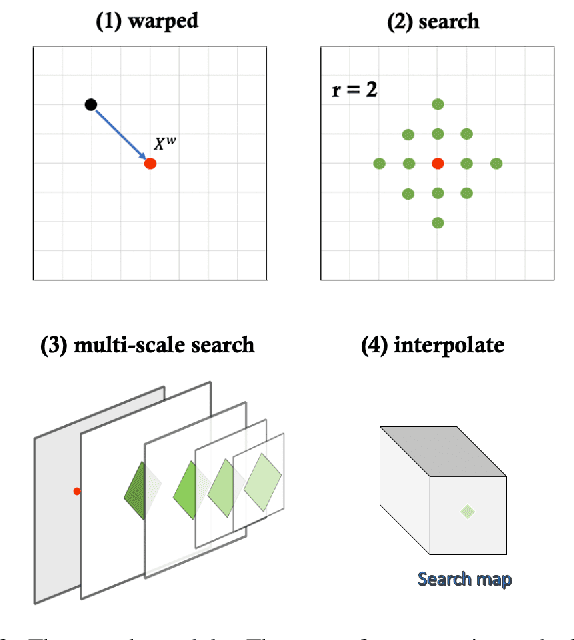
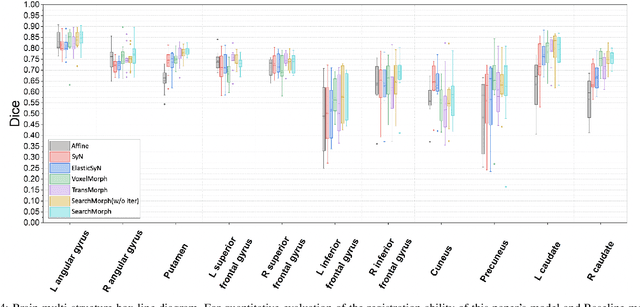
Deformable image registration provides dynamic information about the image and is essential in medical image analysis. However, due to the different characteristics of single-temporal brain MR images and multi-temporal echocardiograms, it is difficult to accurately register them using the same algorithm or model. We propose an unsupervised multi-scale correlation iterative registration network (SearchMorph), and the model has three highlights. (1)We introduced cost volumes to strengthen feature correlations and constructed correlation pyramids to complement multi-scale correlation information. (2) We designed the search module to search for the registration of features in multi-scale pyramids. (3) We use the GRU module for iterative refinement of the deformation field. The proposed network in this paper shows leadership in common single-temporal registration tasks and solves multi-temporal motion estimation tasks. The experimental results show that our proposed method achieves higher registration accuracy and a lower folding point ratio than the state-of-the-art methods.