 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAir-to-Ground Communications Beyond 5G: UAV Swarm Formation Control and Tracking
Paper and Code
Dec 25, 2023
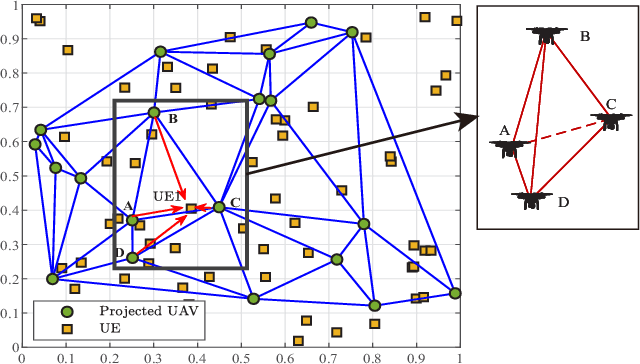
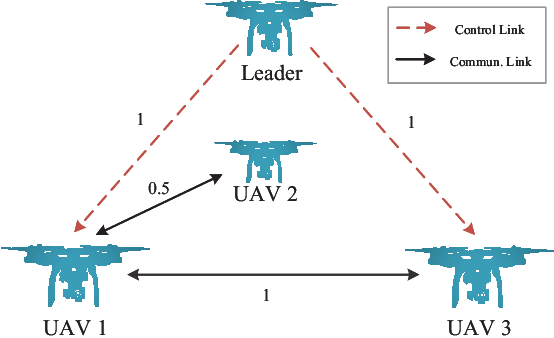
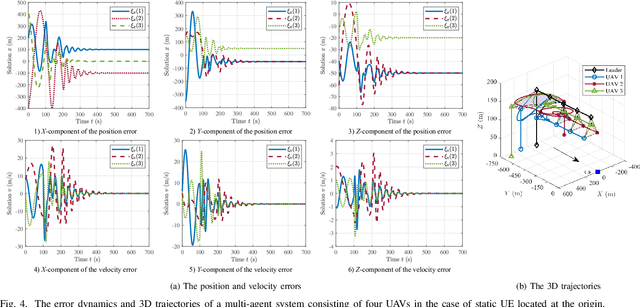
Unmanned aerial vehicle (UAV) communications have been widely accepted as promising technologies to support air-to-ground communications in the forthcoming sixth-generation (6G) wireless networks. This paper proposes a novel air-to-ground communication model consisting of aerial base stations served by UAVs and terrestrial user equipments (UEs) by integrating the technique of coordinated multi-point (CoMP) transmission with the theory of stochastic geometry. In particular, a CoMP set consisting of multiple UAVs is developed based on the theory of Poisson-Delaunay tetrahedralization. Effective UAV formation control and UAV swarm tracking schemes for two typical scenarios, including static and mobile UEs, are also developed using the multi-agent system theory to ensure that collaborative UAVs can efficiently reach target spatial positions for mission execution. Thanks to the ease of mathematical tractability, this model provides explicit performance expressions for a typical UE's coverage probability and achievable ergodic rate. Extensive simulation and numerical results corroborate that the proposed scheme outperforms UAV communications without CoMP transmission and obtains similar performance to the conventional CoMP scheme while avoiding search overhead.