 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReactive Motion Generation With Particle-Based Perception in Dynamic Environments
Feb 18, 2026Reactive motion generation in dynamic and unstructured scenarios is typically subject to essentially static perception and system dynamics. Reliably modeling dynamic obstacles and optimizing collision-free trajectories under perceptive and control uncertainty are challenging. This article focuses on revealing tight connection between reactive planning and dynamic mapping for manipulators from a model-based perspective. To enable efficient particle-based perception with expressively dynamic property, we present a tensorized particle weight update scheme that explicitly maintains obstacle velocities and covariance meanwhile. Building upon this dynamic representation, we propose an obstacle-aware MPPI-based planning formulation that jointly propagates robot-obstacle dynamics, allowing future system motion to be predicted and evaluated under uncertainty. The model predictive method is shown to significantly improve safety and reactivity with dynamic surroundings. By applying our complete framework in simulated and noisy real-world environments, we demonstrate that explicit modeling of robot-obstacle dynamics consistently enhances performance over state-of-the-art MPPI-based perception-planning baselines avoiding multiple static and dynamic obstacles.
Learning Multimodal Confidence for Intention Recognition in Human-Robot Interaction
May 23, 2024



The rapid development of collaborative robotics has provided a new possibility of helping the elderly who has difficulties in daily life, allowing robots to operate according to specific intentions. However, efficient human-robot cooperation requires natural, accurate and reliable intention recognition in shared environments. The current paramount challenge for this is reducing the uncertainty of multimodal fused intention to be recognized and reasoning adaptively a more reliable result despite current interactive condition. In this work we propose a novel learning-based multimodal fusion framework Batch Multimodal Confidence Learning for Opinion Pool (BMCLOP). Our approach combines Bayesian multimodal fusion method and batch confidence learning algorithm to improve accuracy, uncertainty reduction and success rate given the interactive condition. In particular, the generic and practical multimodal intention recognition framework can be easily extended further. Our desired assistive scenarios consider three modalities gestures, speech and gaze, all of which produce categorical distributions over all the finite intentions. The proposed method is validated with a six-DoF robot through extensive experiments and exhibits high performance compared to baselines.
Joint convolutional neural pyramid for depth map super-resolution
Jan 03, 2018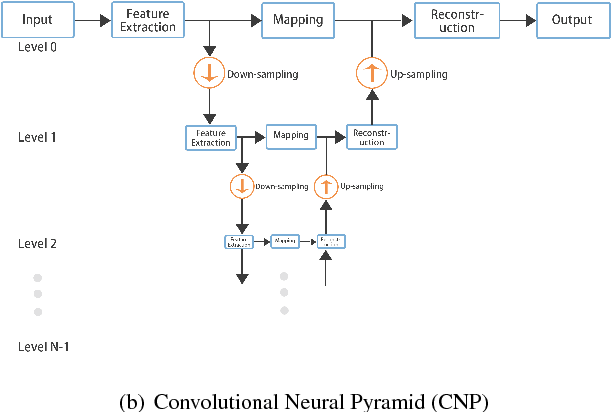
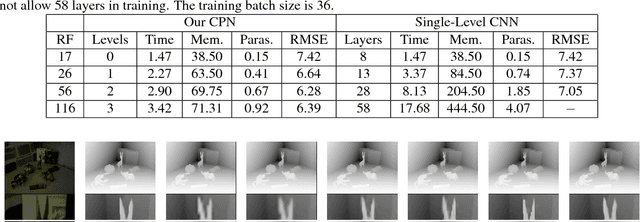
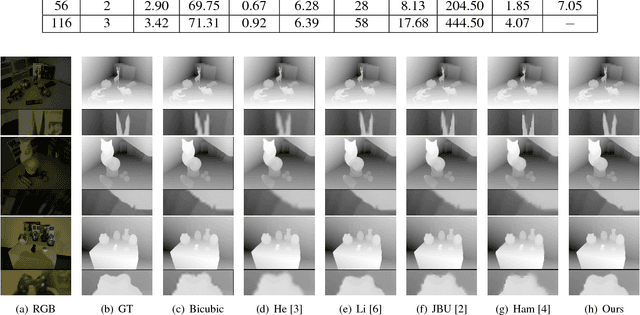
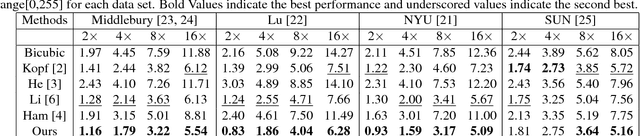
High-resolution depth map can be inferred from a low-resolution one with the guidance of an additional high-resolution texture map of the same scene. Recently, deep neural networks with large receptive fields are shown to benefit applications such as image completion. Our insight is that super resolution is similar to image completion, where only parts of the depth values are precisely known. In this paper, we present a joint convolutional neural pyramid model with large receptive fields for joint depth map super-resolution. Our model consists of three sub-networks, two convolutional neural pyramids concatenated by a normal convolutional neural network. The convolutional neural pyramids extract information from large receptive fields of the depth map and guidance map, while the convolutional neural network effectively transfers useful structures of the guidance image to the depth image. Experimental results show that our model outperforms existing state-of-the-art algorithms not only on data pairs of RGB/depth images, but also on other data pairs like color/saliency and color-scribbles/colorized images.