 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhysics Symbolic Learner for Discovering Ground-Motion Models Via NGA-West2 Database
Mar 23, 2023Ground-motion model (GMM) is the basis of many earthquake engineering studies. In this study, a novel physics-informed symbolic learner (PISL) method based on the Nest Generation Attenuation-West2 database is proposed to automatically discover mathematical equation operators as symbols. The sequential threshold ridge regression algorithm is utilized to distill a concise and interpretable explicit characterization of complex systems of ground motions. In addition to the basic variables retrieved from previous GMMs, the current PISL incorporates two a priori physical conditions, namely, distance and amplitude saturation. GMMs developed using the PISL, an empirical regression method (ERM), and an artificial neural network (ANN) are compared in terms of residuals and extrapolation based on obtained data of peak ground acceleration and velocity. The results show that the inter- and intra-event standard deviations of the three methods are similar. The functional form of the PISL is more concise than that of the ERM and ANN. The extrapolation capability of the PISL is more accurate than that of the ANN. The PISL-GMM used in this study provide a new paradigm of regression that considers both physical and data-driven machine learning and can be used to identify the implied physical relationships and prediction equations of ground motion variables in different regions.
Learning Free Gait Transition for Quadruped Robots via Phase-Guided Controller
Jan 01, 2022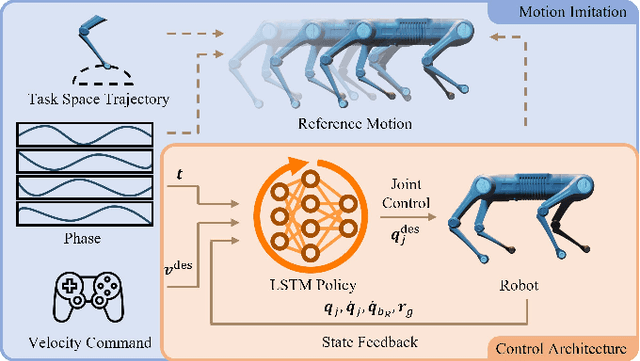
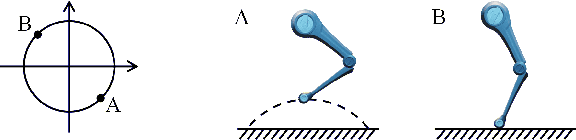

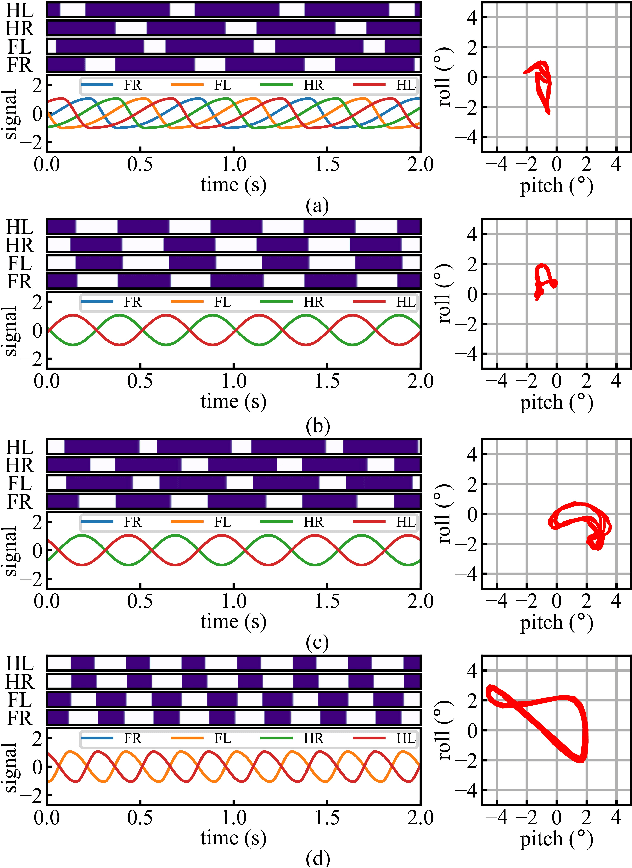
Gaits and transitions are key components in legged locomotion. For legged robots, describing and reproducing gaits as well as transitions remain longstanding challenges. Reinforcement learning has become a powerful tool to formulate controllers for legged robots. Learning multiple gaits and transitions, nevertheless, is related to the multi-task learning problems. In this work, we present a novel framework for training a simple control policy for a quadruped robot to locomote in various gaits. Four independent phases are used as the interface between the gait generator and the control policy, which characterizes the movement of four feet. Guided by the phases, the quadruped robot is able to locomote according to the generated gaits, such as walk, trot, pacing and bounding, and to make transitions among those gaits. More general phases can be used to generate complex gaits, such as mixed rhythmic dancing. With the control policy, the Black Panther robot, a medium-dog-sized quadruped robot, can perform all learned motor skills while following the velocity commands smoothly and robustly in natural environment.