 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Autonomous Path Planning Method for Unmanned Aerial Vehicle based on A Tangent Intersection and Target Guidance Strategy
Jun 07, 2020
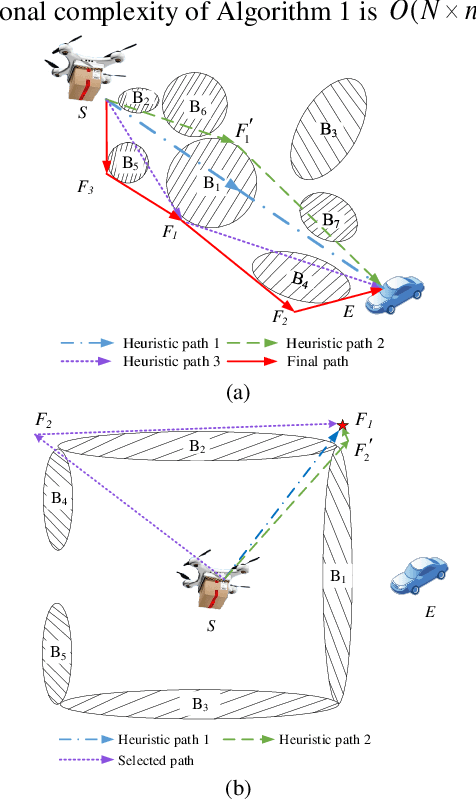
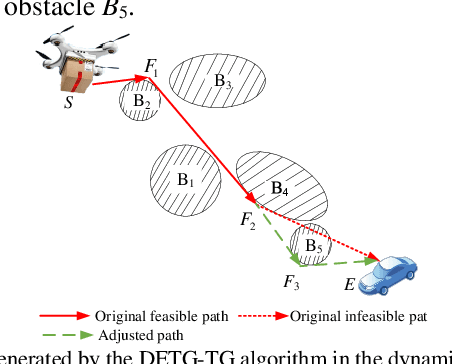
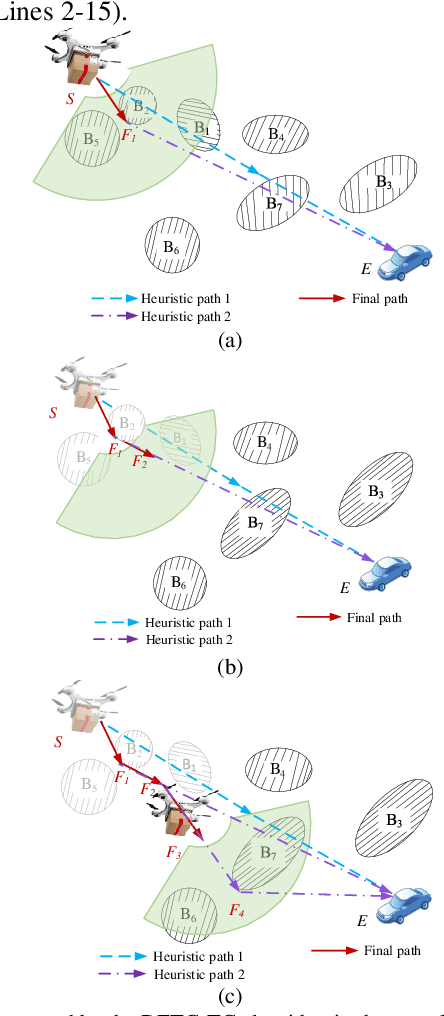
Unmanned aerial vehicle (UAV) path planning enables UAVs to avoid obstacles and reach the target efficiently. To generate high-quality paths without obstacle collision for UAVs, this paper proposes a novel autonomous path planning algorithm based on a tangent intersection and target guidance strategy (APPATT). Guided by a target, the elliptic tangent graph method is used to generate two sub-paths, one of which is selected based on heuristic rules when confronting an obstacle. The UAV flies along the selected sub-path and repeatedly adjusts its flight path to avoid obstacles through this way until the collision-free path extends to the target. Considering the UAV kinematic constraints, the cubic B-spline curve is employed to smooth the waypoints for obtaining a feasible path. Compared with A*, PRM, RRT and VFH, the experimental results show that APPATT can generate the shortest collision-free path within 0.05 seconds for each instance under static environments. Moreover, compared with VFH and RRTRW, APPATT can generate satisfactory collision-free paths under uncertain environments in a nearly real-time manner. It is worth noting that APPATT has the capability of escaping from simple traps within a reasonable time.