 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuick Multi-Robot Motion Planning by Combining Sampling and Search
Mar 01, 2022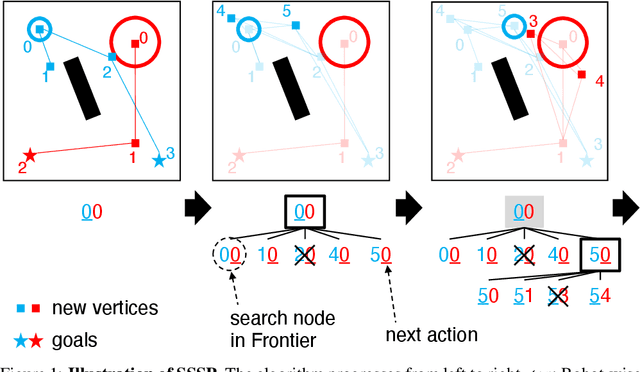
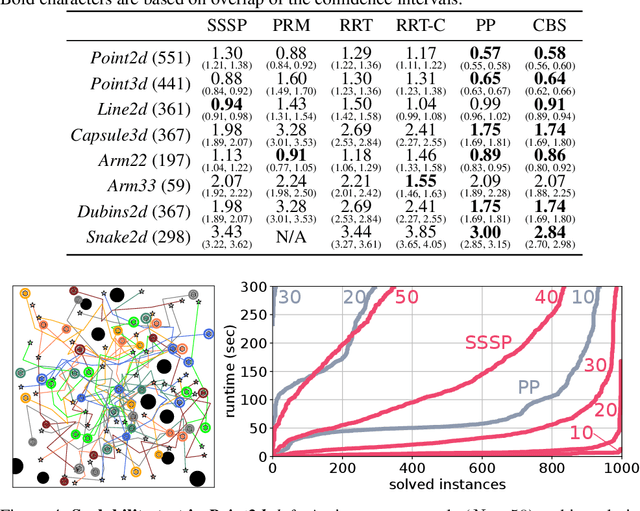
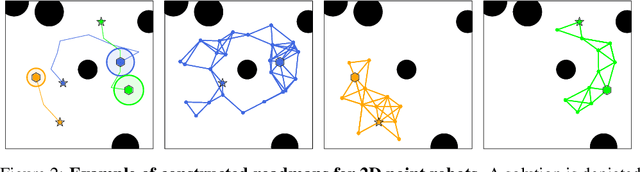
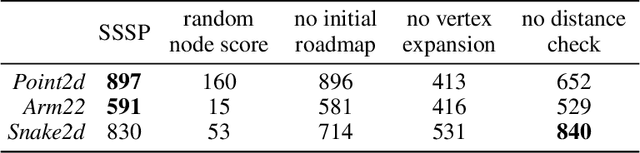
We propose a novel algorithm to solve multi-robot motion planning (MRMP) rapidly, that we call Simultaneous Sampling-and-Search Planning (SSSP). Conventional MRMP studies mostly take the form of two-phase planning that constructs roadmaps then finds inter-robot collision-free paths on those roadmaps. In contrast, SSSP performs roadmap construction and collision-free pathfinding at the same time. This is realized by uniting techniques of single-robot sampling-based motion planning and search techniques of multi-agent pathfinding on discretized environments. SSSP ensures to find a solution if exists on the search space defined by the Cartesian product of robot-wise roadmaps. Our empirical evaluation in various scenarios demonstrates that SSSP significantly outperforms standard approaches to MRMP, i.e., solving more problem instances much faster. We also applied SSSP to planning for 32 ground robots in a dense situation.
Solving Simultaneous Target Assignment and Path Planning Efficiently with Time-Independent Execution
Sep 09, 2021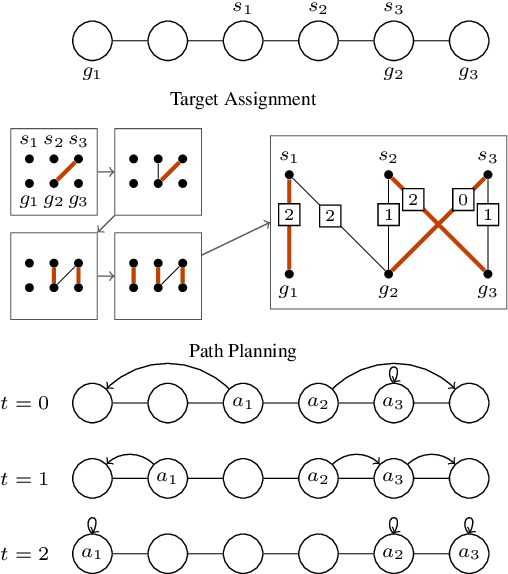
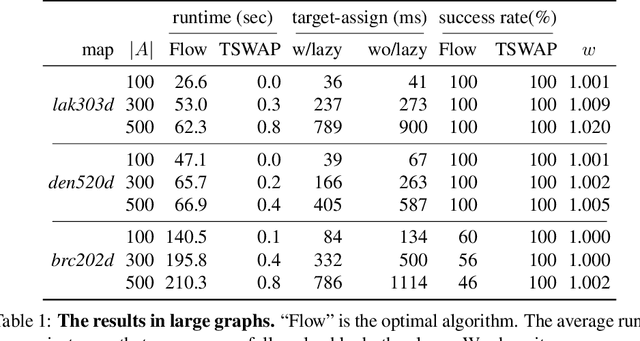
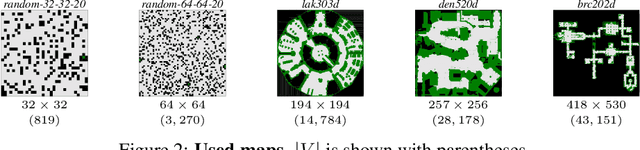

Real-time planning for a combined problem of target assignment and path planning for multiple agents, also known as the unlabeled version of Multi-Agent Path Finding (MAPF), is crucial for high-level coordination in multi-agent systems, e.g., pattern formation by robot swarms. This paper studies two aspects of unlabeled-MAPF: (1) offline scenario: solving large instances by centralized approaches with small computation time, and (2) online scenario: executing unlabeled-MAPF despite timing uncertainties of real robots. For this purpose, we propose TSWAP, a novel complete algorithm consisting of target assignment with lazy evaluation and path planning with target swapping. TSWAP can adapt to both offline and online scenarios. We empirically demonstrate that Offline TSWAP is highly scalable; providing near-optimal solutions while reducing runtime by orders of magnitude compared to existing approaches. In addition, we present the benefits of Online TSWAP, such as delay tolerance, through real-robot demos.
Roadside-assisted Cooperative Planning using Future Path Sharing for Autonomous Driving
Aug 10, 2021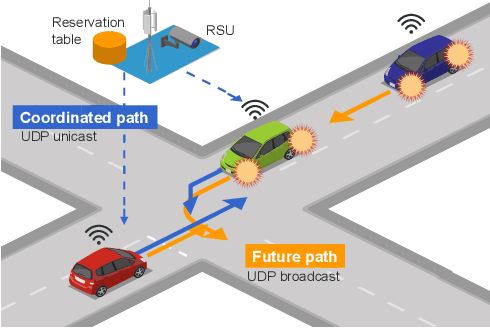

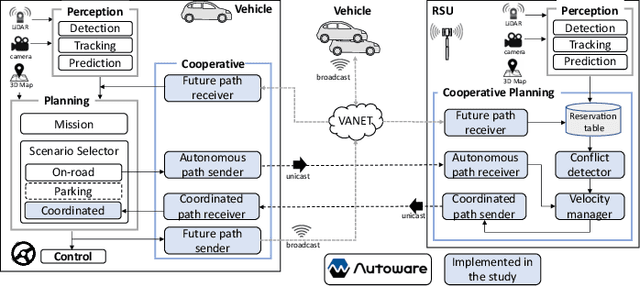
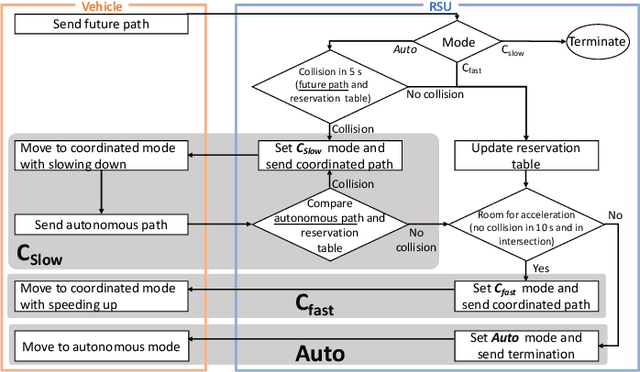
Cooperative intelligent transportation systems (ITS) are used by autonomous vehicles to communicate with surrounding autonomous vehicles and roadside units (RSU). Current C-ITS applications focus primarily on real-time information sharing, such as cooperative perception. In addition to real-time information sharing, self-driving cars need to coordinate their action plans to achieve higher safety and efficiency. For this reason, this study defines a vehicle's future action plan/path and designs a cooperative path-planning model at intersections using future path sharing based on the future path information of multiple vehicles. The notion is that when the RSU detects a potential conflict of vehicle paths or an acceleration opportunity according to the shared future paths, it will generate a coordinated path update that adjusts the speeds of the vehicles. We implemented the proposed method using the open-source Autoware autonomous driving software and evaluated it with the LGSVL autonomous vehicle simulator. We conducted simulation experiments with two vehicles at a blind intersection scenario, finding that each car can travel safely and more efficiently by planning a path that reflects the action plans of all vehicles involved. The time consumed by introducing the RSU is 23.0 % and 28.1 % shorter than that of the stand-alone autonomous driving case at the intersection.
Offline Time-Independent Multi-Agent Path Planning
May 15, 2021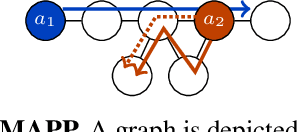
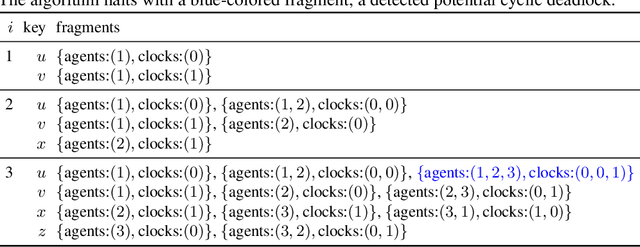
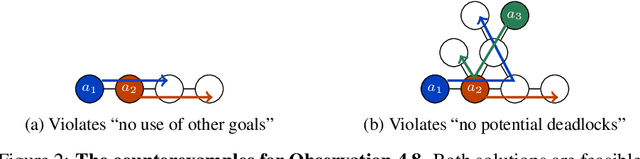
This paper studies a novel planning problem for multiple agents moving on graphs that we call offline time-independent multi-agent path planning (OTIMAPP). The motivation is to overcome time uncertainties in multi-agent scenarios where we cannot expect agents to act perfectly following timed plans, e.g., executions with mobile robots. For this purpose, OTIMAPP abandons all timing assumptions; it is offline planning that assumes event-driven executions without or less run-time effort. The problem is finding plans to be terminated correctly in any action orders of agents, i.e., guaranteeing that all agents eventually reach their destinations. We address a bunch of questions for this problem: required conditions for feasible solutions, computational complexity, comparison with well-known other multi-agent problems, construction of solvers, effective relaxation of a solution concept, and how to implement the plans by actual robots. Throughout the paper, we establish the foundation of OTIMAPP and demonstrate its utility. A video is available at https://kei18.github.io/otimapp.
Active Modular Environment for Robot Navigation
Feb 25, 2021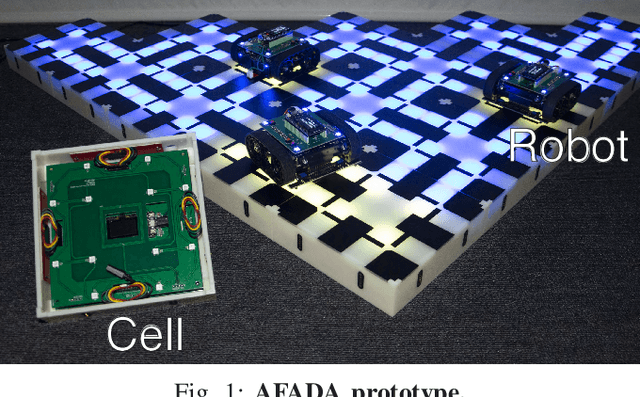

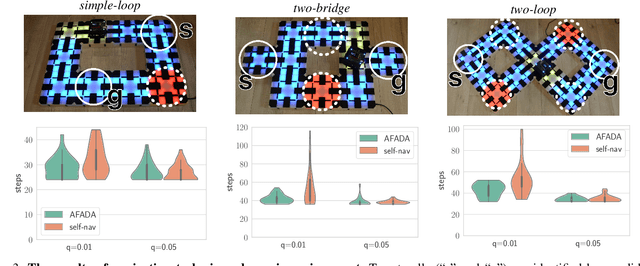

This paper presents a novel robot-environment interaction in navigation tasks such that robots have neither a representation of their working space nor planning function, instead, an active environment takes charge of these aspects. This is realized by spatially deploying computing units, called cells, and making cells manage traffic in their respective physical region. Different from stigmegic approaches, cells interact with each other to manage environmental information and to construct instructions on how robots move. As a proof-of-concept, we present an architecture called AFADA and its prototype, consisting of modular cells and robots moving on the cells. The instructions from cells are based on a distributed routing algorithm and a reservation protocol. We demonstrate that AFADA achieves efficient robot moves for single-robot navigation in a dynamic environment changing its topology with a stochastic model, comparing to self-navigation by a robot itself. This is followed by several demos, including multi-robot navigation, highlighting the power of offloading both representation and planning from robots to the environment. We expect that the concept of AFADA contributes to developing the infrastructure for multiple robots because it can engage online and lifelong planning and execution.
Time-Independent Planning for Multiple Moving Agents
May 27, 2020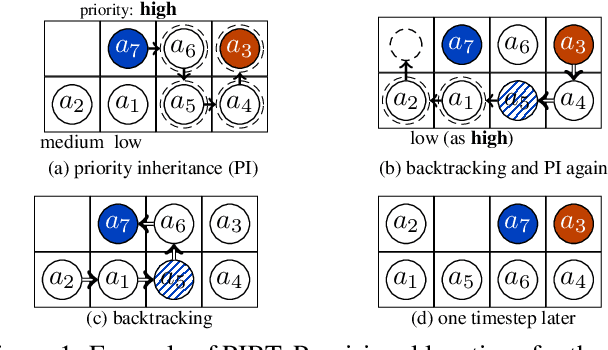

Typical Multi-agent Path Finding (MAPF) solvers assume that agents move synchronously, thus neglecting the reality gap in timing assumptions, e.g., delays caused by an imperfect execution of asynchronous moves. So far, two policies enforce a robust execution of MAPF plans taken as input, namely, either by forcing agents to synchronize, or by executing plans while preserving temporal dependencies. This paper proposes a third approach, called time-independent planning, which is both online and distributed. We represent reality as a transition system that changes configurations according to atomic actions of agents, and use it to generate a time-independent schedule. Empirical results in a simulated environment with stochastic delays of agents' moves support the validity of our proposal.
winPIBT: Extended Prioritized Algorithm for Iterative Multi-agent Path Finding
Jun 14, 2019



Providing agents with efficient paths so as not to collide with each other are called the Multi-agent Path Finding (MAPF) problem. Numerous solvers have been developed so far since MAPF is critical for practical applications such as automated warehouses. Priority Inheritance with Backtracking (PIBT) is an instance of decoupled approach which solves MAPF iteratively by flexible prioritized planning. PIBT plans the paths of all agents one step at a time, i.e., the time window size is just one, and this locality causes inefficient path planning in some cases. In this work, we propose a generalized algorithm of PIBT with respect to the time window, called Windowed Priority Inheritance with Backtracking (winPIBT). winPIBT extends PIBT by enabling retroactive priority inheritance and backtracking. We prove that, similar to PIBT, all agents reach their own destinations in finite time as long as the environment is a graph such that all pairs of adjacent nodes belong to a simple cycle of length 3 or more (e.g., biconnected). We evaluate winPIBT through simulation in various environments while changing the window size. Our results confirm that winPIBT mitigates livelock situations occurring in PIBT, and plans more efficient paths depending on the window size.
Priority Inheritance with Backtracking for Iterative Multi-agent Path Finding
Mar 07, 2019



The Multi-agent Path Finding (MAPF) problem consists in all agents having to move to their own destinations while avoiding collisions. In practical applications to the problem, such as for navigation in an automated warehouse, MAPF must be solved iteratively. We present here a novel approach to iterative MAPF, that we call Priority Inheritance with Backtracking (PIBT). PIBT gives a unique priority to each agent every timestep, so that all movements are prioritized. Priority inheritance, which aims at dealing effectively with priority inversion in path adjustment within a small time window, can be applied iteratively and a backtracking protocol prevents agents from being stuck. We prove that, regardless of their number, all agents are guaranteed to reach their destination within finite time, when the environment is a graph such that all pairs of adjacent nodes belong to a simple cycle of length 3 or more (e.g., biconnected). Our implementation of PIBT can be fully decentralized without global communication. Experimental results over various scenarios demonstrate that PIBT is competitive with the state of the art MAPF solvers, and has high potential in practical situations.
Optimally Gathering Two Robots
Aug 21, 2017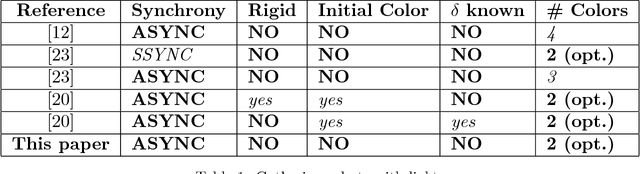
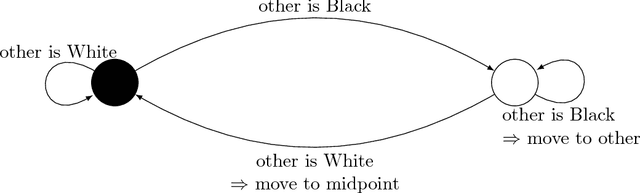
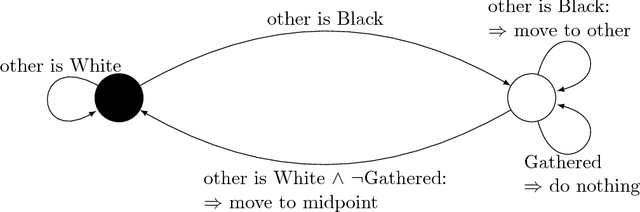
We present an algorithm that ensures in finite time the gathering of two robots in the non-rigid ASYNC model. To circumvent established impossibility results, we assume robots are equipped with 2-colors lights and are able to measure distances between one another. Aside from its light, a robot has no memory of its past actions, and its protocol is deterministic. Since, in the same model, gathering is impossible when lights have a single color, our solution is optimal with respect to the number of used colors.
Fault and Byzantine Tolerant Self-stabilizing Mobile Robots Gathering - Feasibility Study -
Feb 17, 2016



Gathering is a fundamental coordination problem in cooperative mobile robotics. In short, given a set of robots with arbitrary initial locations and no initial agreement on a global coordinate system, gathering requires that all robots, following their algorithm, reach the exact same but not predetermined location. Gathering is particularly challenging in networks where robots are oblivious (i.e., stateless) and direct communication is replaced by observations on their respective locations. Interestingly any algorithm that solves gathering with oblivious robots is inherently self-stabilizing if no specific assumption is made on the initial distribution of the robots. In this paper, we significantly extend the studies of de-terministic gathering feasibility under different assumptions This manuscript considerably extends preliminary results presented as an extended abstract at the DISC 2006 conference [7]. The current version is under review at Distributed Computing Journal since February 2012 (in a previous form) and since 2014 in the current form. The most important results have been also presented in MAC 2010 organized in Ottawa from August 15th to 17th 2010 related to synchrony and faults (crash and Byzantine). Unlike prior work, we consider a larger set of scheduling strategies, such as bounded schedulers. In addition, we extend our study to the feasibility of probabilistic self-stabilizing gathering in both fault-free and fault-prone environments.