 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeABBSPO: Adaptive Bounding Box Scaling and Symmetric Prior based Orientation Prediction for Detecting Aerial Image Objects
Dec 10, 2025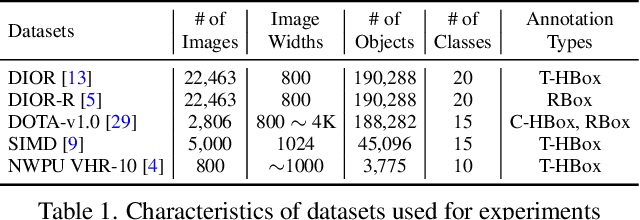
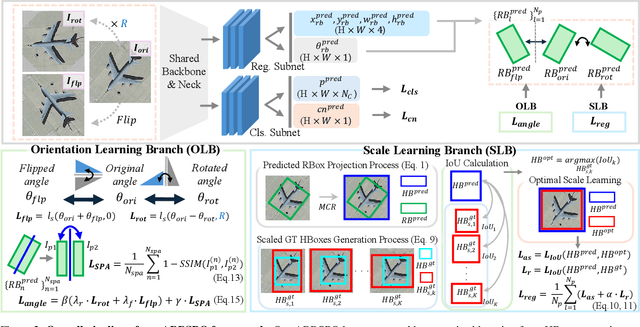
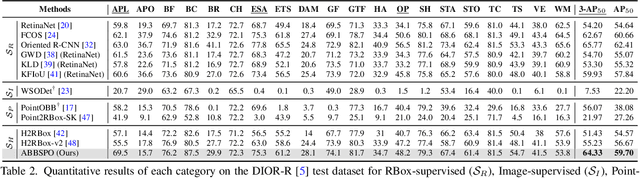
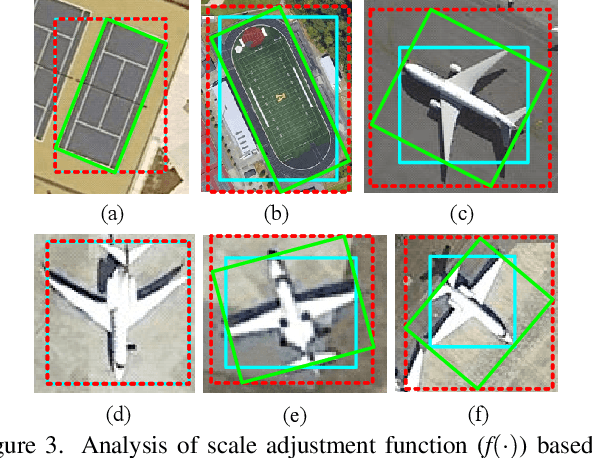
Weakly supervised oriented object detection (WS-OOD) has gained attention as a cost-effective alternative to fully supervised methods, providing both efficiency and high accuracy. Among weakly supervised approaches, horizontal bounding box (HBox)-supervised OOD stands out for its ability to directly leverage existing HBox annotations while achieving the highest accuracy under weak supervision settings. This paper introduces adaptive bounding box scaling and symmetry-prior-based orientation prediction, called ABBSPO, a framework for WS-OOD. Our ABBSPO addresses limitations of previous HBox-supervised OOD methods, which compare ground truth (GT) HBoxes directly with the minimum circumscribed rectangles of predicted RBoxes, often leading to inaccurate scale estimation. To overcome this, we propose: (i) Adaptive Bounding Box Scaling (ABBS), which appropriately scales GT HBoxes to optimize for the size of each predicted RBox, ensuring more accurate scale prediction; and (ii) a Symmetric Prior Angle (SPA) loss that exploits inherent symmetry of aerial objects for self-supervised learning, resolving issues in previous methods where learning collapses when predictions for all three augmented views (original, rotated, and flipped) are consistently incorrect. Extensive experimental results demonstrate that ABBSPO achieves state-of-the-art performance, outperforming existing methods.
Repulsive Trajectory Modification and Conflict Resolution for Efficient Multi-Manipulator Motion Planning
Sep 17, 2025We propose an efficient motion planning method designed to efficiently find collision-free trajectories for multiple manipulators. While multi-manipulator systems offer significant advantages, coordinating their motions is computationally challenging owing to the high dimensionality of their composite configuration space. Conflict-Based Search (CBS) addresses this by decoupling motion planning, but suffers from subsequent conflicts incurred by resolving existing conflicts, leading to an exponentially growing constraint tree of CBS. Our proposed method is based on repulsive trajectory modification within the two-level structure of CBS. Unlike conventional CBS variants, the low-level planner applies a gradient descent approach using an Artificial Potential Field. This field generates repulsive forces that guide the trajectory of the conflicting manipulator away from those of other robots. As a result, subsequent conflicts are less likely to occur. Additionally, we develop a strategy that, under a specific condition, directly attempts to find a conflict-free solution in a single step without growing the constraint tree. Through extensive tests including physical robot experiments, we demonstrate that our method consistently reduces the number of expanded nodes in the constraint tree, achieves a higher success rate, and finds a solution faster compared to Enhanced CBS and other state-of-the-art algorithms.
Reactive Composition of UAV Delivery Services in Urban Environments
Apr 29, 2024We propose a novel failure-aware reactive UAV delivery service composition framework. A skyway network infrastructure is presented for the effective provisioning of services in urban areas. We present a formal drone delivery service model and a system architecture for reactive drone delivery services. We develop radius-based, cell density-based, and two-phased algorithms to reduce the search space and perform reactive service compositions when a service failure occurs. We conduct a set of experiments with a real drone dataset to demonstrate the effectiveness of our proposed approach.
Bridged Adversarial Training
Aug 25, 2021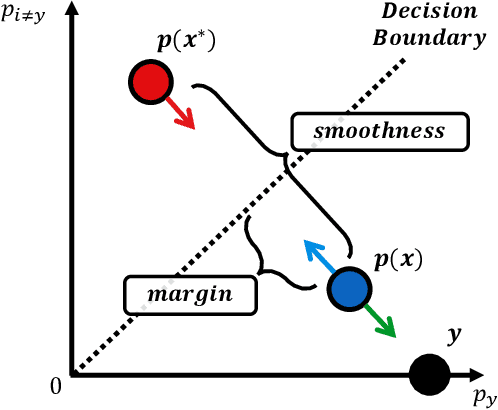
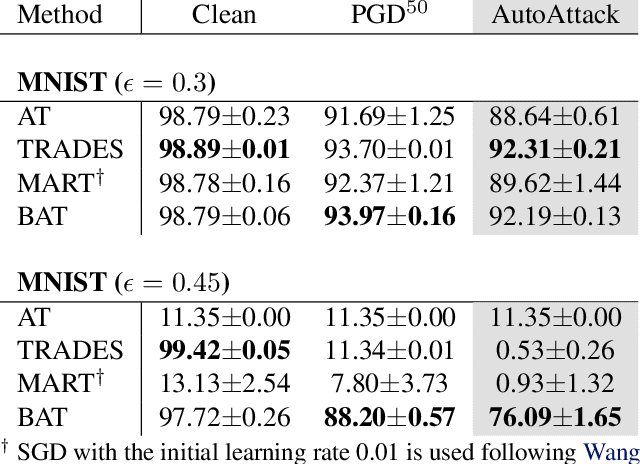
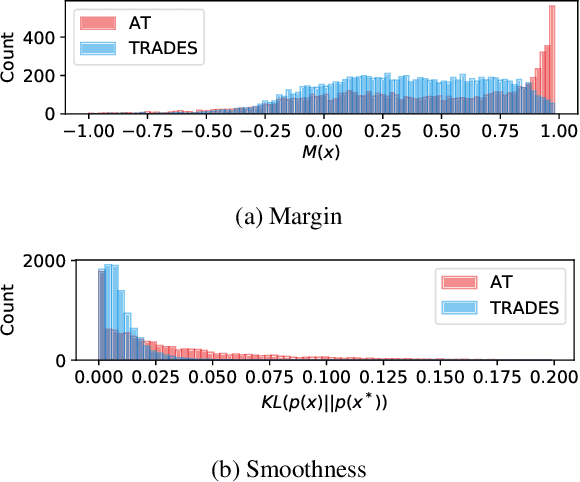
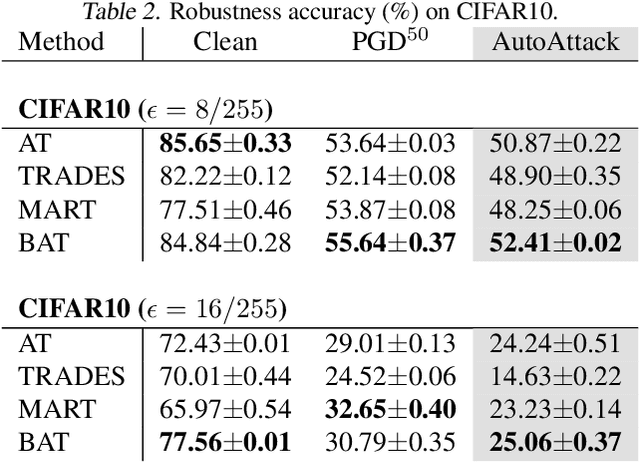
Adversarial robustness is considered as a required property of deep neural networks. In this study, we discover that adversarially trained models might have significantly different characteristics in terms of margin and smoothness, even they show similar robustness. Inspired by the observation, we investigate the effect of different regularizers and discover the negative effect of the smoothness regularizer on maximizing the margin. Based on the analyses, we propose a new method called bridged adversarial training that mitigates the negative effect by bridging the gap between clean and adversarial examples. We provide theoretical and empirical evidence that the proposed method provides stable and better robustness, especially for large perturbations.
Package Delivery Using Autonomous Drones in Skyways
Aug 13, 2021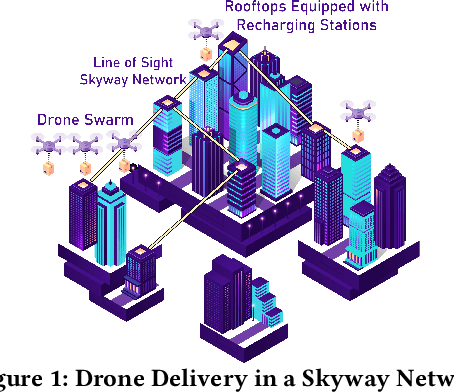
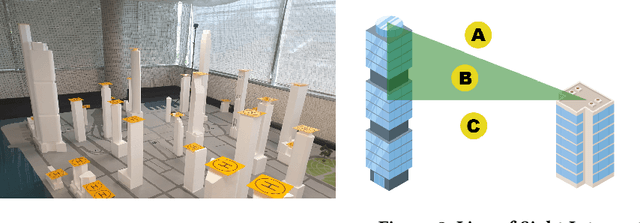
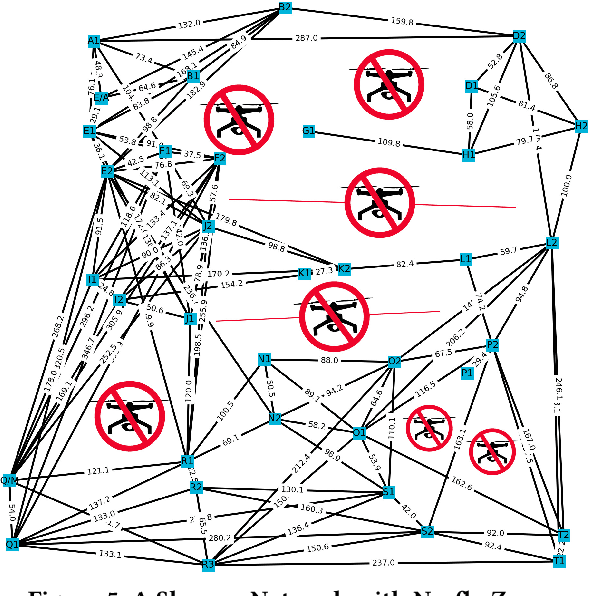
Current drone delivery systems mostly focus on point-to-point package delivery. We present a multi-stop drone service system to deliver packages anywhere anytime within a specified geographic area. We define a skyway network which takes into account flying regulations, including restricted areas and no-fly zones. The skyway nodes typically represent building rooftops which may act as both recharging stations and delivery destinations. A heuristic-based A* algorithm is used to compute an optimal path from source to destination taking into account a number of constraints, including delivery time, availability of recharging stations, etc. We deploy our drone delivery system in an indoor testbed environment using a 3D model of Sydney CBD. We describe a graphical user interface to monitor the real-time package delivery in the skyway network.
Understanding Catastrophic Overfitting in Single-step Adversarial Training
Oct 05, 2020
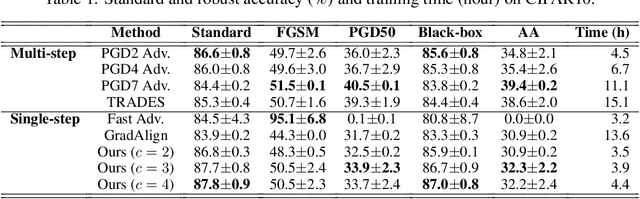
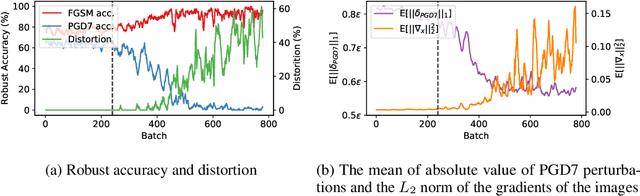
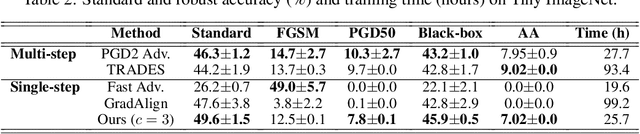
Adversarial examples are perturbed inputs that are designed to deceive machine-learning classifiers by adding adversarial perturbations to the original data. Although fast adversarial training have demonstrated both robustness and efficiency, the problem of "catastrophic overfitting" has been observed. It is a phenomenon that, during single-step adversarial training, the robust accuracy against projected gradient descent (PGD) suddenly decreases to 0% after few epochs, whereas the robustness against fast gradient sign method (FGSM) increases to 100%. In this paper, we address three main topics. (i) We demonstrate that catastrophic overfitting occurs in single-step adversarial training because it trains adversarial images with maximum perturbation only, not all adversarial examples in the adversarial direction, which leads to a distorted decision boundary and a highly curved loss surface. (ii) We experimentally prove this phenomenon by proposing a simple method using checkpoints. This method not only prevents catastrophic overfitting, but also overrides the belief that single-step adversarial training is hard to prevent multi-step attacks. (iii) We compare the performance of the proposed method to that obtained in recent works and demonstrate that it provides sufficient robustness to different attacks even after hundreds of training epochs in less time. All code for reproducing the experiments in this paper are at https://github.com/Harry24k/catastrophic-overfitting.