 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReactive Composition of UAV Delivery Services in Urban Environments
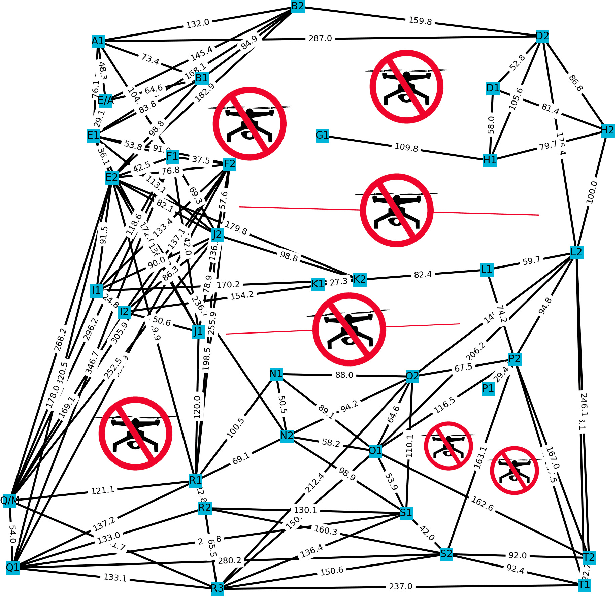
Apr 29, 2024We propose a novel failure-aware reactive UAV delivery service composition framework. A skyway network infrastructure is presented for the effective provisioning of services in urban areas. We present a formal drone delivery service model and a system architecture for reactive drone delivery services. We develop radius-based, cell density-based, and two-phased algorithms to reduce the search space and perform reactive service compositions when a service failure occurs. We conduct a set of experiments with a real drone dataset to demonstrate the effectiveness of our proposed approach.
Immersive 3D Simulator for Drone-as-a-Service
Oct 29, 2023



We propose a 3D simulator tailored for the Drone-as-a-Service framework. The simulator enables employing dynamic algorithms for addressing realistic delivery scenarios. We present the simulator's architectural design and its use of an energy consumption model for drone deliveries. We introduce two primary operational modes within the simulator: the edit mode and the runtime mode. Beyond its simulation capabilities, our simulator serves as a valuable data collection resource, facilitating the creation of datasets through simulated scenarios. Our simulator empowers researchers by providing an intuitive platform to visualize and interact with delivery environments. Moreover, it enables rigorous algorithm testing in a safe simulation setting, thus obviating the need for real-world drone deployments. Demo: https://youtu.be/HOLfo1JiFJ0
Failure-Sentient Composition For Swarm-Based Drone Services
May 23, 2023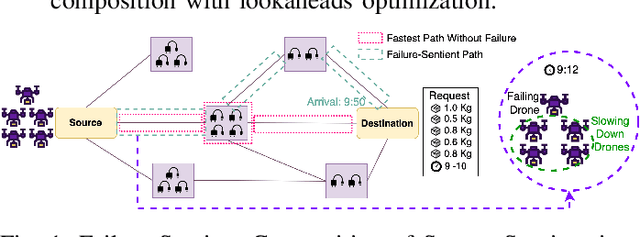
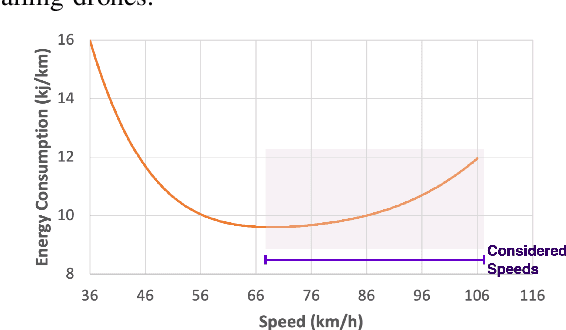
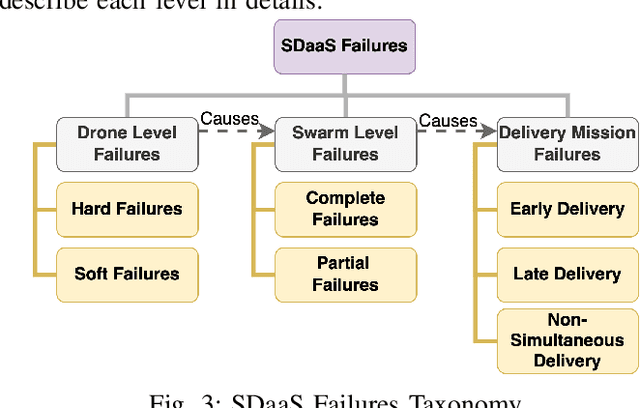
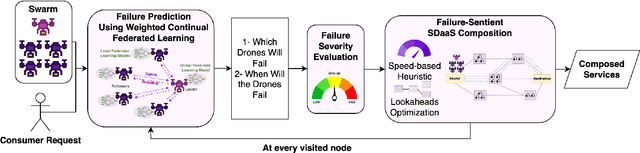
We propose a novel failure-sentient framework for swarm-based drone delivery services. The framework ensures that those drones that experience a noticeable degradation in their performance (called soft failure) and which are part of a swarm, do not disrupt the successful delivery of packages to a consumer. The framework composes a weighted continual federated learning prediction module to accurately predict the time of failures of individual drones and uptime after failures. These predictions are used to determine the severity of failures at both the drone and swarm levels. We propose a speed-based heuristic algorithm with lookahead optimization to generate an optimal set of services considering failures. Experimental results on real datasets prove the efficiency of our proposed approach in terms of prediction accuracy, delivery times, and execution times.
Optimizing Drone Delivery in Smart Cities
Apr 28, 2023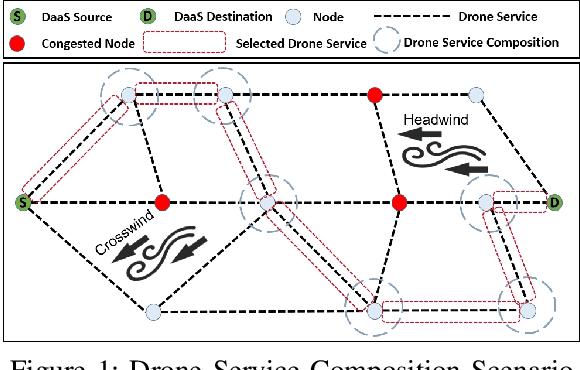
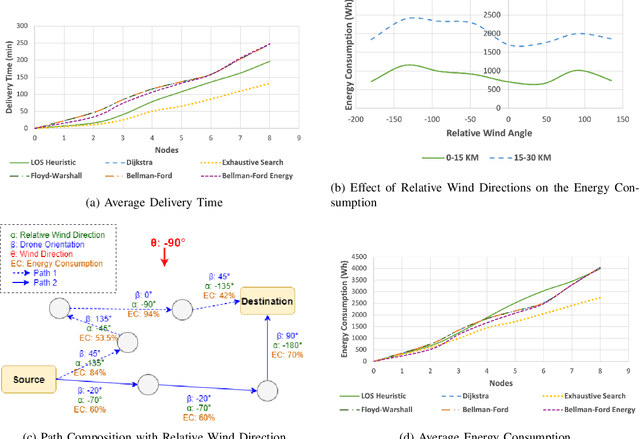
We propose a novel context-aware drone delivery framework for optimizing package delivery through skyway networks in smart cities. We reformulate the problem of finding an optimal drone service delivery pathway as a more congruent and elegant drone delivery service composition problem. In this respect, we propose a novel line-of-sight heuristic-based context-aware composition algorithm that selects and composes near-optimal drone delivery services. We conducted an extensive experiment using a real dataset to show the robustness of our proposed approach.
Service-based Trajectory Planning in Multi-Drone Skyway Networks
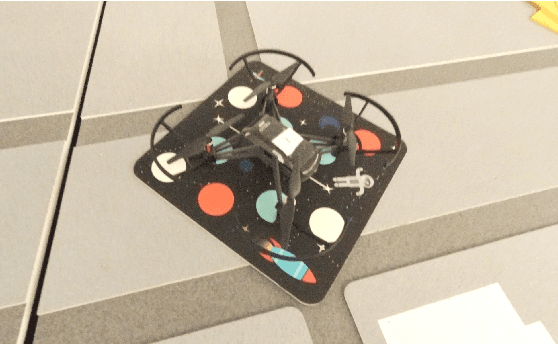
Mar 21, 2023We present a demonstration of service-based trajectory planning for a drone delivery system in a multi-drone skyway network. We conduct several experiments using Crazyflie drones to collect the drone's position data, wind speed and direction, and wind effects on voltage consumption rates. The experiments are run for a varying number of recharging stations, wind speed, and wind direction in a multi-drone skyway network. Demo: https://youtu.be/zEwqdtEmmiw
Drone Formation for Efficient Swarm Energy Consumption
Mar 16, 2023



We demonstrate formation flying for drone swarm services. A set of drones fly in four different swarm formations. A dataset is collected to study the effect of formation flying on energy consumption. We conduct a set of experiments to study the effect of wind on formation flying. We examine the forces the drones exert on each other when flying in a formation. We finally identify and classify the formations that conserve most energy under varying wind conditions. The collected dataset aims at providing researchers data to conduct further research in swarm-based drone service delivery. Demo: https://youtu.be/NnucUWhUwLs
In-Flight Energy-Driven Composition of Drone Swarm Services
Oct 28, 2022



We propose a novel framework for swarm-based drone delivery services with in-flight energy recharging. The framework aims to enhance the delivery time of multiple packages by reducing the number of stops and recharging times at intermediate stations. The proposed framework considers various intrinsic and extrinsic delivery constraints. We propose to use support drones whose sole purpose is to recharge other drones in the swarm during their flight. In this respect, we compute the optimal set of optimal support drones to minimize the probability of delivery services and recharging time at the next stations. We also use two settings to position the support drones in a flight formation for comparative purposes. Two novel energy sharing methods are proposed, namely, Priority-based and Fairness-based methods. A re-ordering method of the delivery drones is presented to facilitate the in-flight energy composition process. An enhanced A* algorithm is implemented to compose the optimal services in terms of delivery time. Experimental results prove the efficiency of our proposed approach.
Autonomous Delivery of Multiple Packages Using Single Drone in Urban Airspace
Sep 04, 2022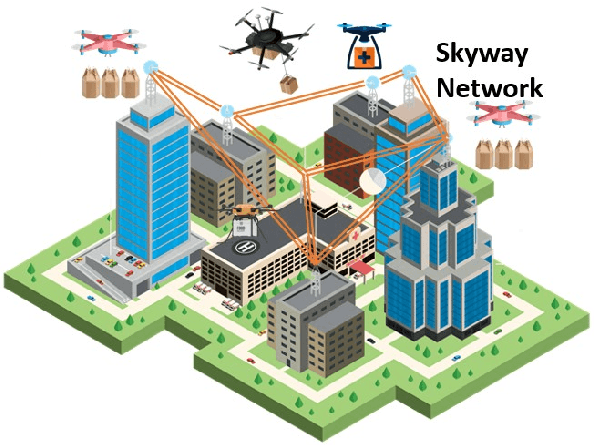
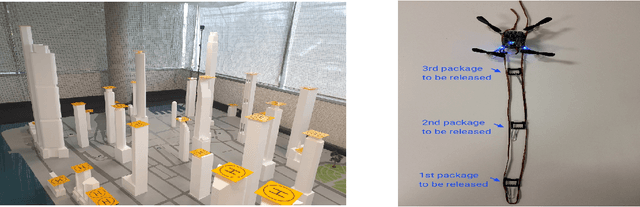
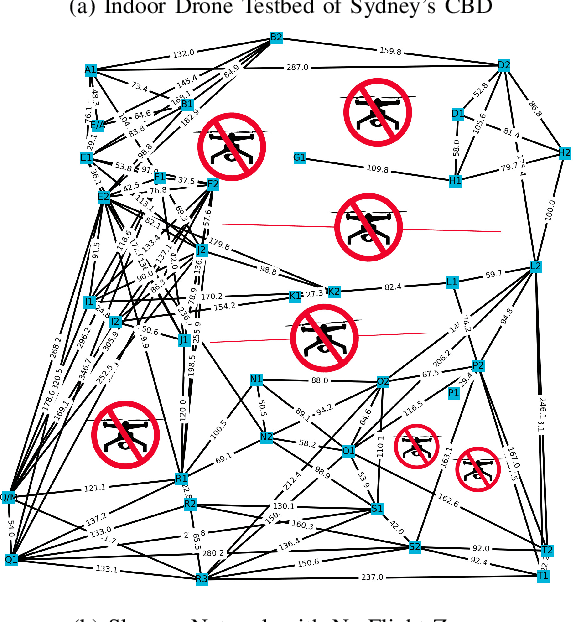
Current drone delivery solutions mainly focus on single package delivery using one drone. However, the recent developments in drone technology enable a drone to deliver multiple packages in a single trip. We use the nearest destination first strategy for the faster delivery of packages in a skyway network. This demonstration is a proof-of-concept prototype for the multi-package delivery in urban airspace following a skyway network. We deploy and test this multi-package drone delivery in an indoor testbed environment using a 3D model of Sydney CBD. Demo: https://youtu.be/YTwsIfUvWPc
Density-Based Pruning of Drone Swarm Services
Jun 09, 2022
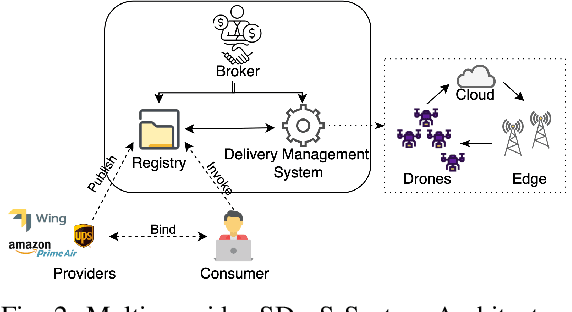
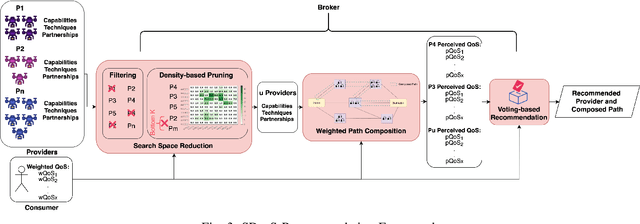
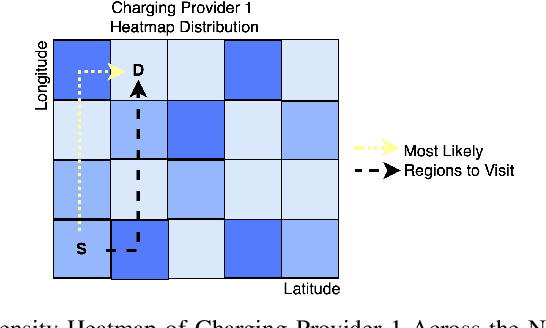
We propose a novel framework for the recommendation of swarm-based drone delivery services based on the consumers preferences. We propose a density-based pruning approach that uses the concept of partnerships with charging station providers to reduce the search space of swarm-based drone service delivery providers. A weighted service composition algorithm is proposed that considers the providers capabilities and consumers' preferences in selecting the best next service. We propose a voting-based recommendation algorithm to select the best providers. We conduct a set of experiments to evaluate the efficiency of the framework in terms of consumer satisfaction, run-time, and search space reduction cost.
Constraint-based Formation of Drone Swarms
Jan 28, 2022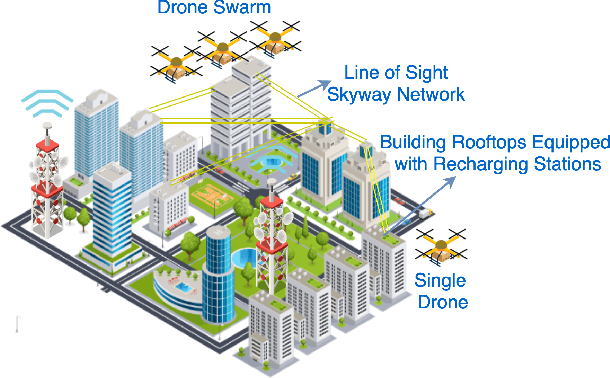
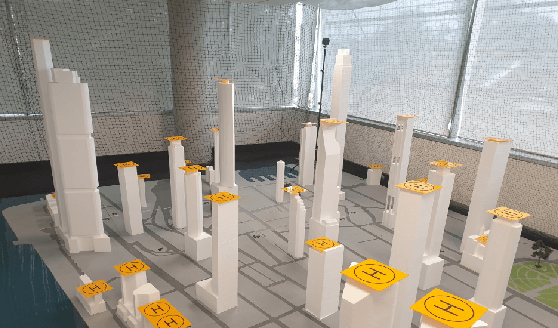
Drone swarms are required for the simultaneous delivery of multiple packages. We demonstrate a multi-stop drone swarm-based delivery in a smart city. We leverage formation flying to conserve energy and increase the flight range of a drone swarm. An adaptive formation is presented in which a swarm adjusts to extrinsic constraints and changes the formation pattern in-flight. We utilize the existing building rooftops in a city and build a line-of-sight skyway network to safely operate the swarms. We use a heuristic-based A* algorithm to route a drone swarm in a skyway network.