 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReactive Composition of UAV Delivery Services in Urban Environments
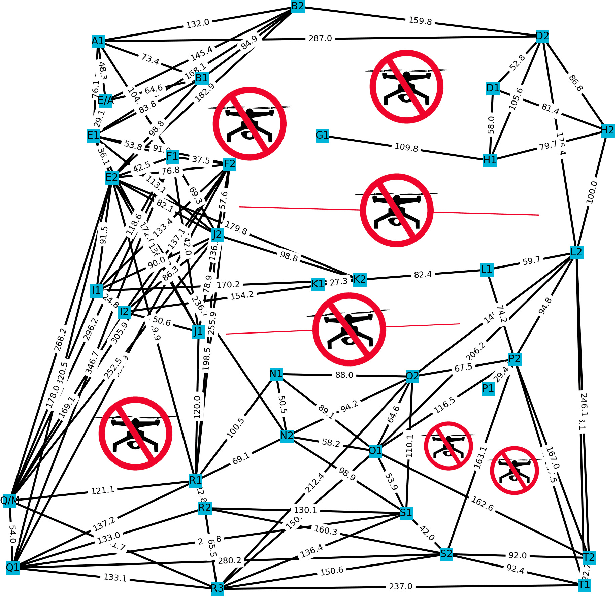
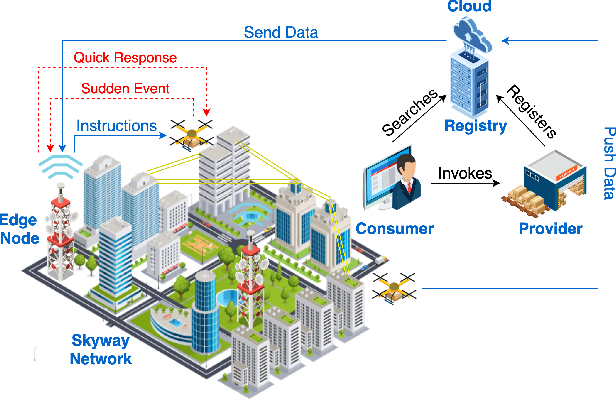
Apr 29, 2024We propose a novel failure-aware reactive UAV delivery service composition framework. A skyway network infrastructure is presented for the effective provisioning of services in urban areas. We present a formal drone delivery service model and a system architecture for reactive drone delivery services. We develop radius-based, cell density-based, and two-phased algorithms to reduce the search space and perform reactive service compositions when a service failure occurs. We conduct a set of experiments with a real drone dataset to demonstrate the effectiveness of our proposed approach.
Optimizing Drone Delivery in Smart Cities
Apr 28, 2023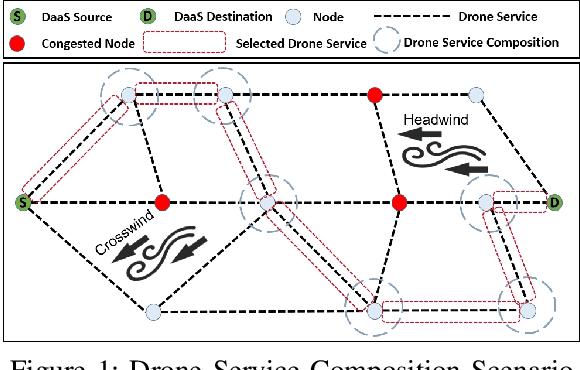
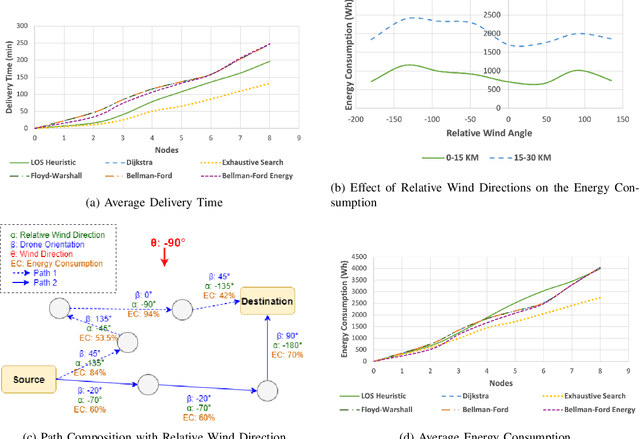
We propose a novel context-aware drone delivery framework for optimizing package delivery through skyway networks in smart cities. We reformulate the problem of finding an optimal drone service delivery pathway as a more congruent and elegant drone delivery service composition problem. In this respect, we propose a novel line-of-sight heuristic-based context-aware composition algorithm that selects and composes near-optimal drone delivery services. We conducted an extensive experiment using a real dataset to show the robustness of our proposed approach.
Service-based Trajectory Planning in Multi-Drone Skyway Networks
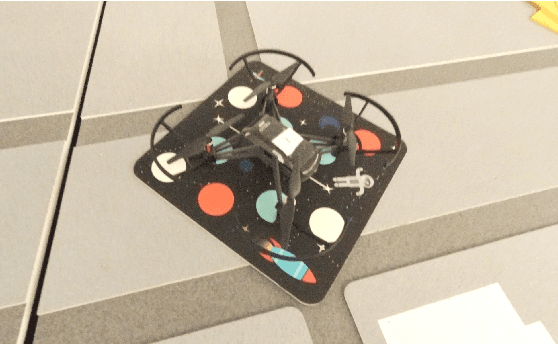
Mar 21, 2023We present a demonstration of service-based trajectory planning for a drone delivery system in a multi-drone skyway network. We conduct several experiments using Crazyflie drones to collect the drone's position data, wind speed and direction, and wind effects on voltage consumption rates. The experiments are run for a varying number of recharging stations, wind speed, and wind direction in a multi-drone skyway network. Demo: https://youtu.be/zEwqdtEmmiw
Drone Formation for Efficient Swarm Energy Consumption
Mar 16, 2023



We demonstrate formation flying for drone swarm services. A set of drones fly in four different swarm formations. A dataset is collected to study the effect of formation flying on energy consumption. We conduct a set of experiments to study the effect of wind on formation flying. We examine the forces the drones exert on each other when flying in a formation. We finally identify and classify the formations that conserve most energy under varying wind conditions. The collected dataset aims at providing researchers data to conduct further research in swarm-based drone service delivery. Demo: https://youtu.be/NnucUWhUwLs
Autonomous Delivery of Multiple Packages Using Single Drone in Urban Airspace
Sep 04, 2022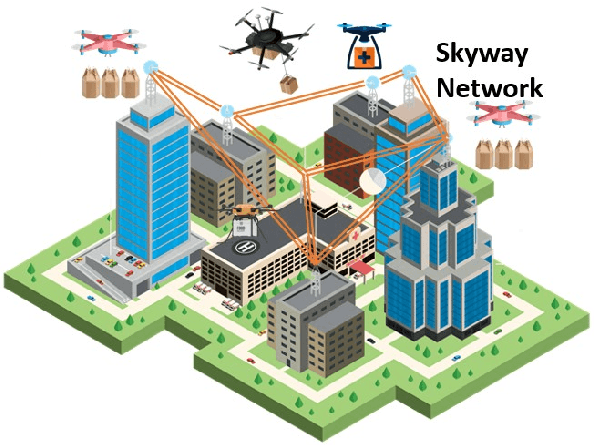
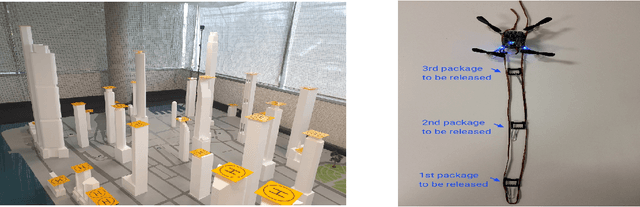
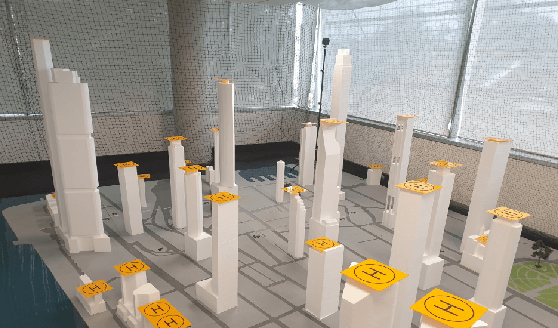
Current drone delivery solutions mainly focus on single package delivery using one drone. However, the recent developments in drone technology enable a drone to deliver multiple packages in a single trip. We use the nearest destination first strategy for the faster delivery of packages in a skyway network. This demonstration is a proof-of-concept prototype for the multi-package delivery in urban airspace following a skyway network. We deploy and test this multi-package drone delivery in an indoor testbed environment using a 3D model of Sydney CBD. Demo: https://youtu.be/YTwsIfUvWPc
Service-Oriented Architecture for Drone-based Multi-Package Delivery
Jun 12, 2022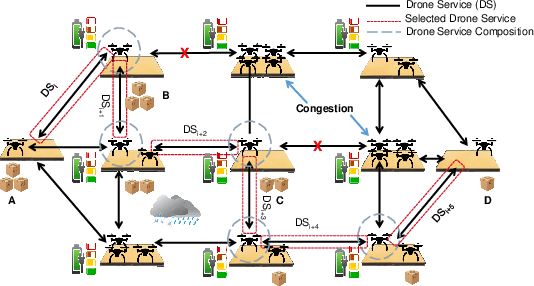
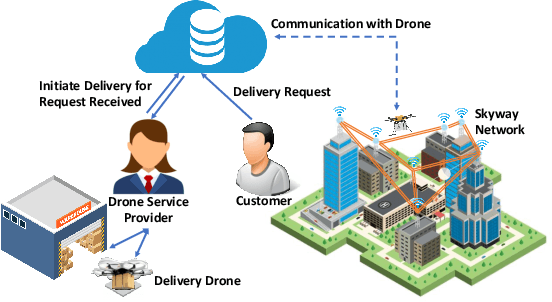
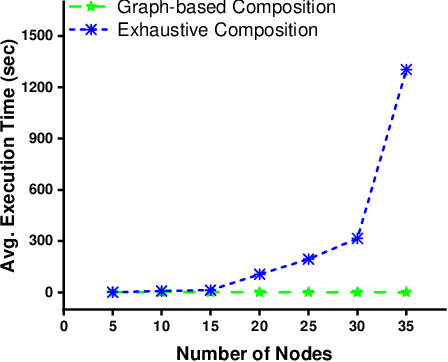
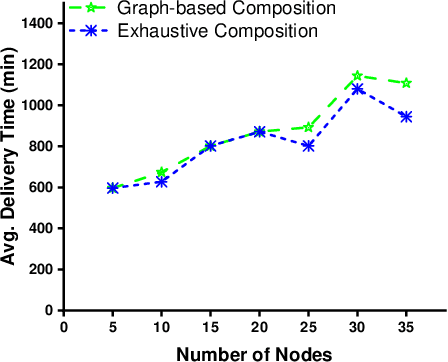
We propose a novel service-oriented architecture for drone-based multi-package delivery in a skyway network. The proposed architecture provides a high-level design for deploying a skyway network in a city for the effective provisioning of drone services. We propose a graph-based heuristic to reduce the search space for optimal service selection in the skyway network. We then find an optimal solution using the selected drone services under a set of constraints. We conduct experiments to demonstrate the efficiency of our proposed approach.
Constraint-based Formation of Drone Swarms
Jan 28, 2022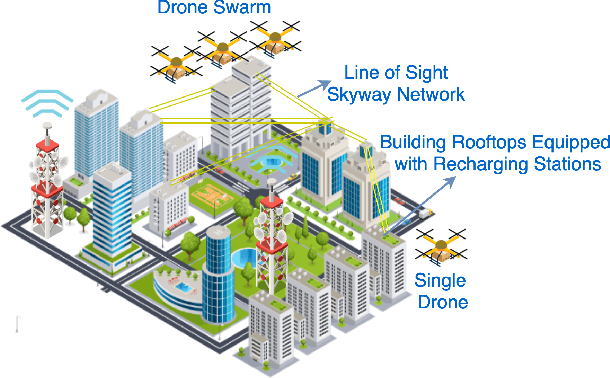
Drone swarms are required for the simultaneous delivery of multiple packages. We demonstrate a multi-stop drone swarm-based delivery in a smart city. We leverage formation flying to conserve energy and increase the flight range of a drone swarm. An adaptive formation is presented in which a swarm adjusts to extrinsic constraints and changes the formation pattern in-flight. We utilize the existing building rooftops in a city and build a line-of-sight skyway network to safely operate the swarms. We use a heuristic-based A* algorithm to route a drone swarm in a skyway network.
Service-Based Drone Delivery
Jan 02, 2022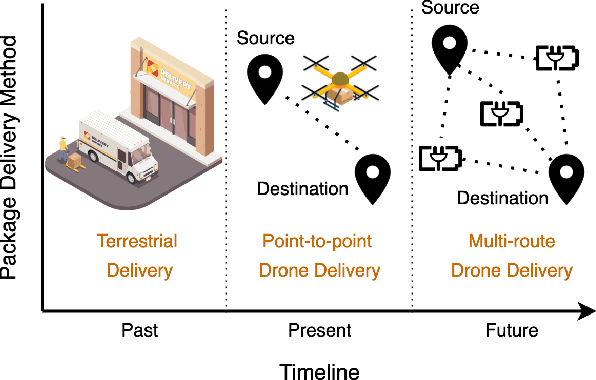


Service delivery is set to experience a major paradigm shift with fast advances in drone technologies coupled with higher expectations from customers and increased competition. We propose a novel service-oriented approach to enable the ubiquitous delivery of packages in a drone-operated skyway network. We discuss the benefits, framework and architecture, contemporary approaches, open challenges and future visioned directions of service-based drone deliveries.
Constraint-Aware Trajectory for Drone Delivery Services
Oct 30, 2021

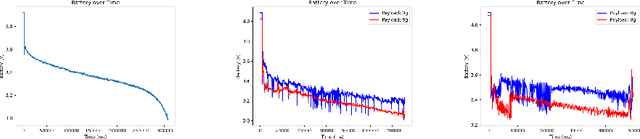
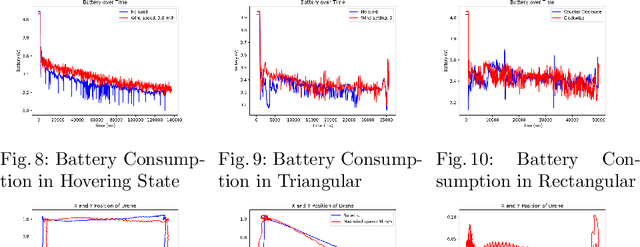
Drones are becoming a novel means for delivery services. We present a demonstration of drone delivery services in a skyway network that uses the service paradigm. A set of experiments is conducted using Crazyflie drones to collect the data on various positions of drones, wind speed, wind direction, and battery consumption. We run the experiments for a range of flight patterns including linear, rectangular, and triangular shapes.
Package Delivery Using Autonomous Drones in Skyways
Aug 13, 2021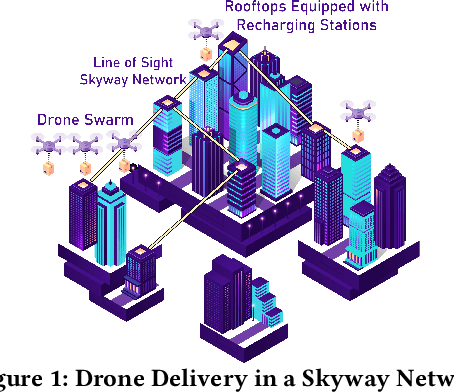
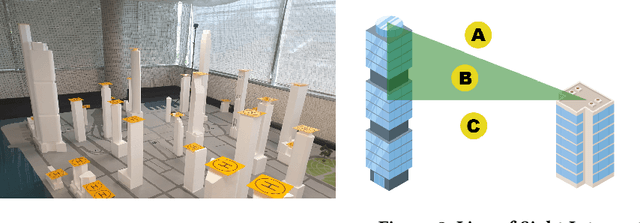
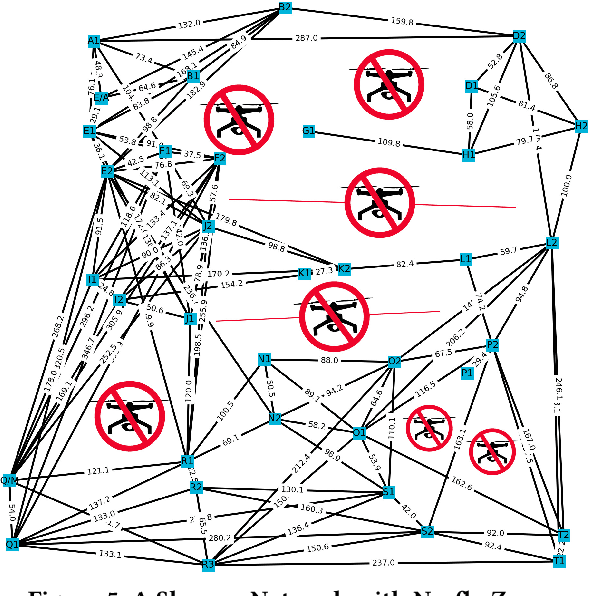
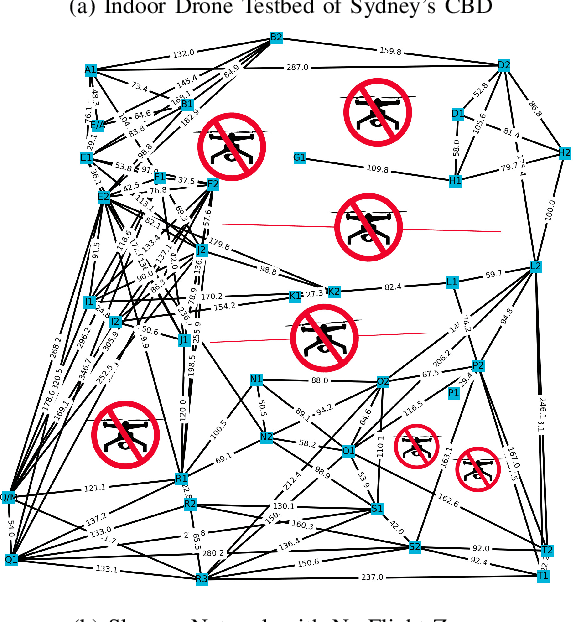
Current drone delivery systems mostly focus on point-to-point package delivery. We present a multi-stop drone service system to deliver packages anywhere anytime within a specified geographic area. We define a skyway network which takes into account flying regulations, including restricted areas and no-fly zones. The skyway nodes typically represent building rooftops which may act as both recharging stations and delivery destinations. A heuristic-based A* algorithm is used to compute an optimal path from source to destination taking into account a number of constraints, including delivery time, availability of recharging stations, etc. We deploy our drone delivery system in an indoor testbed environment using a 3D model of Sydney CBD. We describe a graphical user interface to monitor the real-time package delivery in the skyway network.