 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePositional Encoding-based Resident Identification in Multi-resident Smart Homes
Oct 27, 2023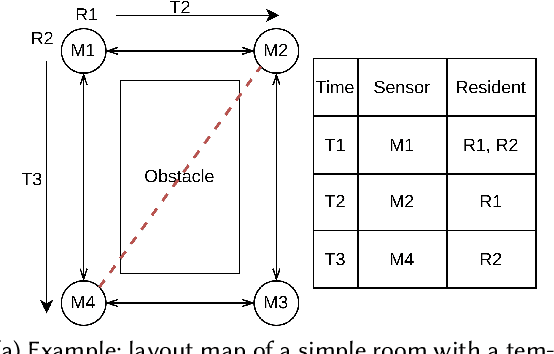
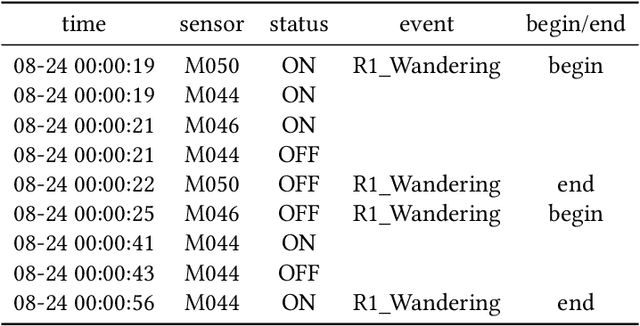
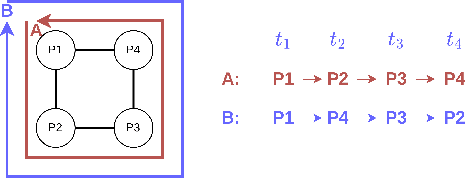
We propose a novel resident identification framework to identify residents in a multi-occupant smart environment. The proposed framework employs a feature extraction model based on the concepts of positional encoding. The feature extraction model considers the locations of homes as a graph. We design a novel algorithm to build such graphs from layout maps of smart environments. The Node2Vec algorithm is used to transform the graph into high-dimensional node embeddings. A Long Short-Term Memory (LSTM) model is introduced to predict the identities of residents using temporal sequences of sensor events with the node embeddings. Extensive experiments show that our proposed scheme effectively identifies residents in a multi-occupant environment. Evaluation results on two real-world datasets demonstrate that our proposed approach achieves 94.5% and 87.9% accuracy, respectively.
Failure-Sentient Composition For Swarm-Based Drone Services
May 23, 2023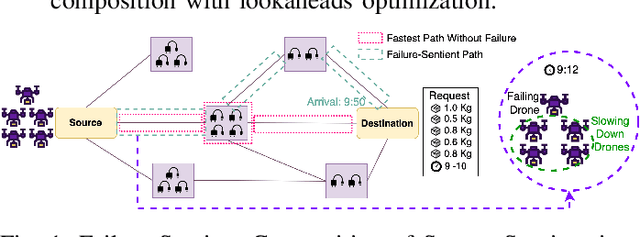
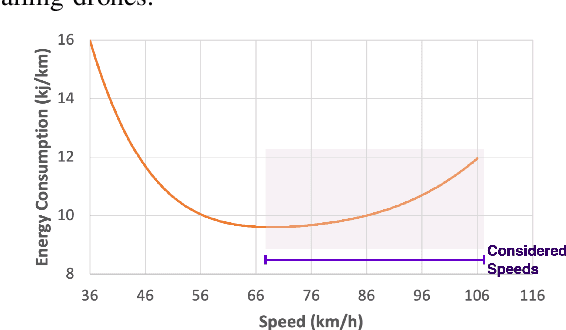
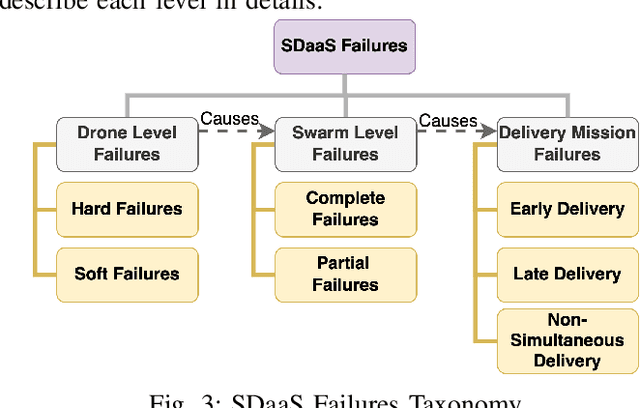
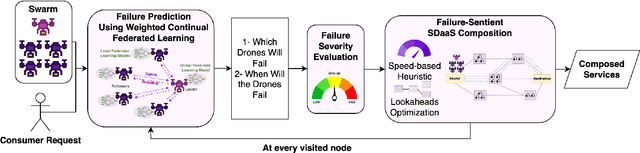
We propose a novel failure-sentient framework for swarm-based drone delivery services. The framework ensures that those drones that experience a noticeable degradation in their performance (called soft failure) and which are part of a swarm, do not disrupt the successful delivery of packages to a consumer. The framework composes a weighted continual federated learning prediction module to accurately predict the time of failures of individual drones and uptime after failures. These predictions are used to determine the severity of failures at both the drone and swarm levels. We propose a speed-based heuristic algorithm with lookahead optimization to generate an optimal set of services considering failures. Experimental results on real datasets prove the efficiency of our proposed approach in terms of prediction accuracy, delivery times, and execution times.
CrowdWeb: A Visualization Tool for Mobility Patterns in Smart Cities
May 22, 2023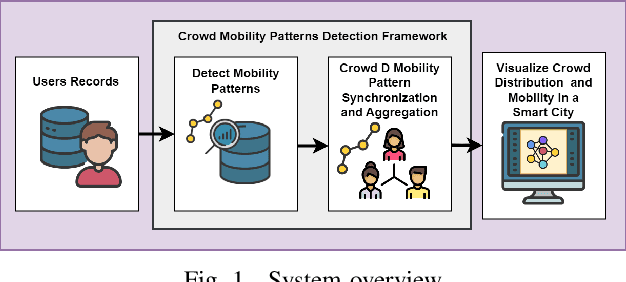
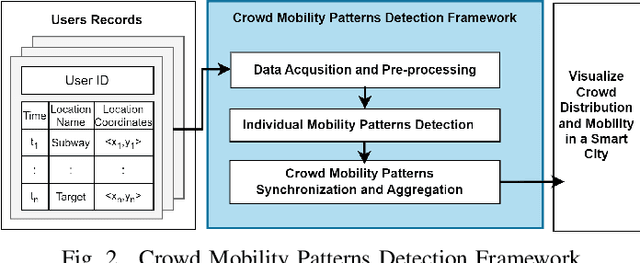

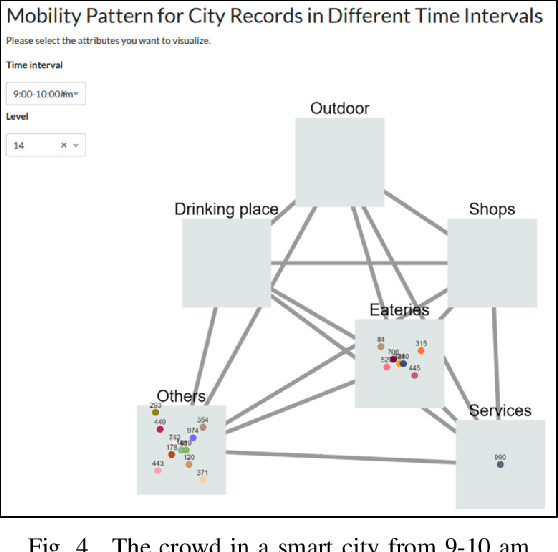
Human mobility patterns refer to the regularities and trends in the way people move, travel, or navigate through different geographical locations over time. Detecting human mobility patterns is essential for a variety of applications, including smart cities, transportation management, and disaster response. The accuracy of current mobility prediction models is less than 25%. The low accuracy is mainly due to the fluid nature of human movement. Typically, humans do not adhere to rigid patterns in their daily activities, making it difficult to identify hidden regularities in their data. To address this issue, we proposed a web platform to visualize human mobility patterns by abstracting the locations into a set of places to detect more realistic patterns. However, the platform was initially designed to detect individual mobility patterns, making it unsuitable for representing the crowd in a smart city scale. Therefore, we extend the platform to visualize the mobility of multiple users from a city-scale perspective. Our platform allows users to visualize a graph of visited places based on their historical records using a modified PrefixSpan approach. Additionally, the platform synchronizes, aggregates, and displays crowd mobility patterns across various time intervals within a smart city. We showcase our platform using a real dataset.
Energy Loss Prediction in IoT Energy Services
May 16, 2023We propose a novel Energy Loss Prediction(ELP) framework that estimates the energy loss in sharing crowdsourced energy services. Crowdsourcing wireless energy services is a novel and convenient solution to enable the ubiquitous charging of nearby IoT devices. Therefore, capturing the wireless energy sharing loss is essential for the successful deployment of efficient energy service composition techniques. We propose Easeformer, a novel attention-based algorithm to predict the battery levels of IoT devices in a crowdsourced energy sharing environment. The predicted battery levels are used to estimate the energy loss. A set of experiments were conducted to demonstrate the feasibility and effectiveness of the proposed framework. We conducted extensive experiments on real wireless energy datasets to demonstrate that our framework significantly outperforms existing methods.
Service-based Trajectory Planning in Multi-Drone Skyway Networks
Mar 21, 2023We present a demonstration of service-based trajectory planning for a drone delivery system in a multi-drone skyway network. We conduct several experiments using Crazyflie drones to collect the drone's position data, wind speed and direction, and wind effects on voltage consumption rates. The experiments are run for a varying number of recharging stations, wind speed, and wind direction in a multi-drone skyway network. Demo: https://youtu.be/zEwqdtEmmiw
Drone Formation for Efficient Swarm Energy Consumption
Mar 16, 2023We demonstrate formation flying for drone swarm services. A set of drones fly in four different swarm formations. A dataset is collected to study the effect of formation flying on energy consumption. We conduct a set of experiments to study the effect of wind on formation flying. We examine the forces the drones exert on each other when flying in a formation. We finally identify and classify the formations that conserve most energy under varying wind conditions. The collected dataset aims at providing researchers data to conduct further research in swarm-based drone service delivery. Demo: https://youtu.be/NnucUWhUwLs
Monitoring Efficiency of IoT Wireless Charging
Mar 10, 2023Crowdsourcing wireless energy is a novel and convenient solution to charge nearby IoT devices. Several applications have been proposed to enable peer-to-peer wireless energy charging. However, none of them considered the energy efficiency of the wireless transfer of energy. In this paper, we propose an energy estimation framework that predicts the actual received energy. Our framework uses two machine learning algorithms, namely XGBoost and Neural Network, to estimate the received energy. The result shows that the Neural Network model is better than XGBoost at predicting the received energy. We train and evaluate our models by collecting a real wireless energy dataset.
In-Flight Energy-Driven Composition of Drone Swarm Services
Oct 28, 2022



We propose a novel framework for swarm-based drone delivery services with in-flight energy recharging. The framework aims to enhance the delivery time of multiple packages by reducing the number of stops and recharging times at intermediate stations. The proposed framework considers various intrinsic and extrinsic delivery constraints. We propose to use support drones whose sole purpose is to recharge other drones in the swarm during their flight. In this respect, we compute the optimal set of optimal support drones to minimize the probability of delivery services and recharging time at the next stations. We also use two settings to position the support drones in a flight formation for comparative purposes. Two novel energy sharing methods are proposed, namely, Priority-based and Fairness-based methods. A re-ordering method of the delivery drones is presented to facilitate the in-flight energy composition process. An enhanced A* algorithm is implemented to compose the optimal services in terms of delivery time. Experimental results prove the efficiency of our proposed approach.
IMAP: Individual huMAn mobility Patterns visualizing platform
Sep 08, 2022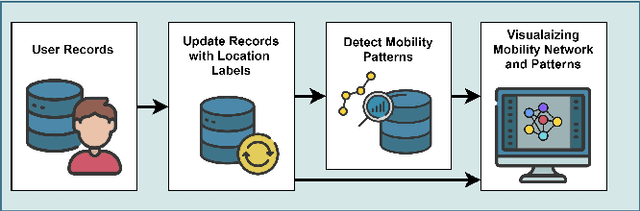
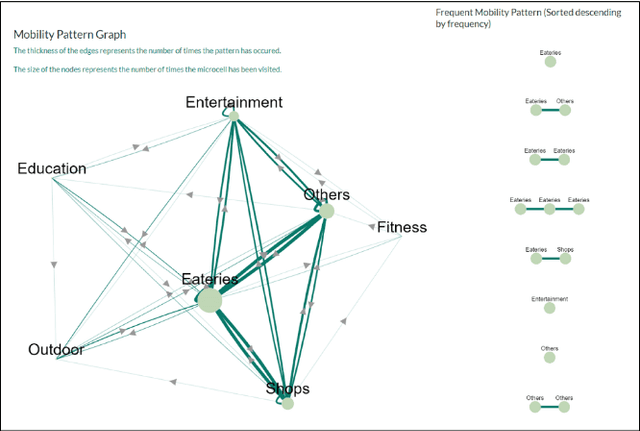
Understanding human mobility is essential for the development of smart cities and social behavior research. Human mobility models may be used in numerous applications, including pandemic control, urban planning, and traffic management. The existing models' accuracy in predicting users' mobility patterns is less than 25%. The low accuracy may be justified by the flexible nature of the human movement. Indeed, humans are not rigid in their daily movement. In addition, the rigid mobility models may result in missing the hidden regularities in users' records. Thus, we propose a novel perspective to study and analyze human mobility patterns and capture their flexibility. Typically, the mobility patterns are represented by a sequence of locations. We propose to define the mobility patterns by abstracting these locations into a set of places. Labeling these locations will allow us to detect close-to-reality hidden patterns. We present IMAP, an Individual huMAn mobility Patterns visualizing platform. Our platform enables users to visualize a graph of the places they visited based on their history records. In addition, our platform displays the most frequent mobility patterns computed using a modified PrefixSpan approach.
DIY-IPS: Towards an Off-the-Shelf Accurate Indoor Positioning System
Sep 08, 2022
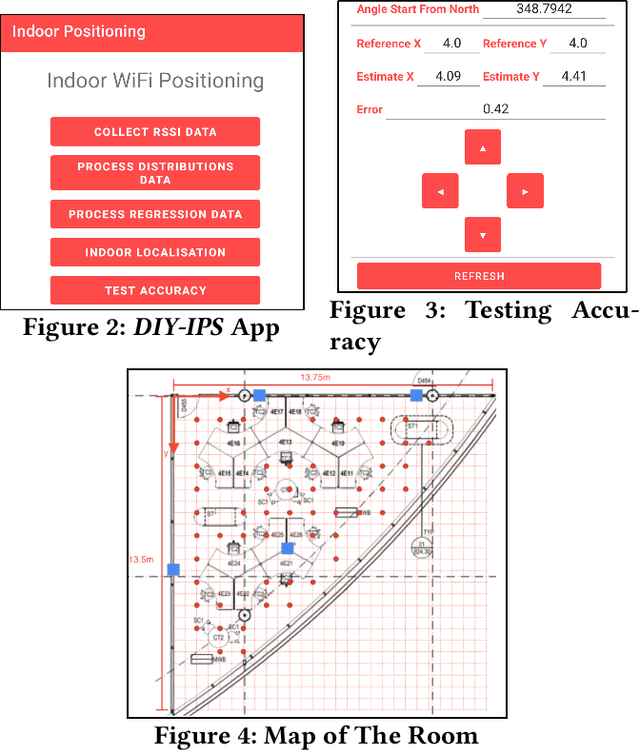
We present DIY-IPS - Do It Yourself - Indoor Positioning System, an open-source real-time indoor positioning mobile application. DIY-IPS detects users' indoor position by employing dual-band RSSI fingerprinting of available WiFi access points. The app can be used, without additional infrastructural costs, to detect users' indoor positions in real time. We published our app as an open source to save other researchers time recreating it. The app enables researchers/users to (1) collect indoor positioning datasets with a ground truth label, (2) customize the app for higher accuracy or other research purposes (3) test the accuracy of modified methods by live testing with ground truth. We ran preliminary experiments to demonstrate the effectiveness of the app.