 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHigh Precision In-Pipe Robot Localization with Reciprocal Sensor Fusion
Feb 27, 2020
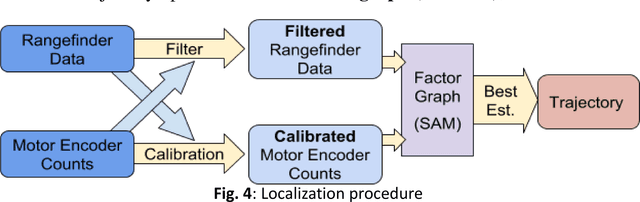
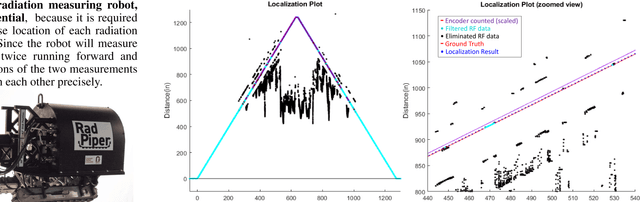
The huge advantage of in-pipe robots is that they are able to measure from inside the pipes, and to sense the geometry, appearance and radiometry directly. The downside is the inability to know precise, absolute position of the measurements in very long pipe runs. This paper develops the unprecedented localization required for this purpose.
* 12 pages, "Superior Paper Award" on WM Symposia 2019
Automated Analysis, Reporting, and Archiving for Robotic Nondestructive Assay of Holdup Deposits
Jan 29, 2019To decommission deactivated gaseous diffusion enrichment facilities, miles of contaminated pipe must be measured. The current method requires thousands of manual measurements, repeated manual data transcription, and months of manual analysis. The Pipe Crawling Activity Measurement System (PCAMS), developed by Carnegie Mellon University and in commissioning for use at the DOE Portsmouth Gaseous Diffusion Enrichment Facility, uses a robot to measure Uranium-235 from inside pipes and automatically log the data. Radiation measurements, as well as imagery, geometric modeling, and precise measurement positioning data are digitally transferred to the PCAMS server. On the server, data can be automatically processed in minutes and summarized for analyst review. Measurement reports are auto-generated with the push of a button. A database specially-configured to hold heterogeneous data such as spectra, images, and robot trajectories serves as archive. This paper outlines the features and design of the PCAMS Post-Processing Software, currently in commissioning for use at the Portsmouth Gaseous Diffusion Enrichment Facility. The analysis process, the analyst interface to the system, and the content of auto-generated reports are each described. Example pipe-interior geometric surface models, illustration of how key report features apply in operational runs, and user feedback are discussed.
A Robot for Nondestructive Assay of Holdup Deposits in Gaseous Diffusion Piping
Jan 29, 2019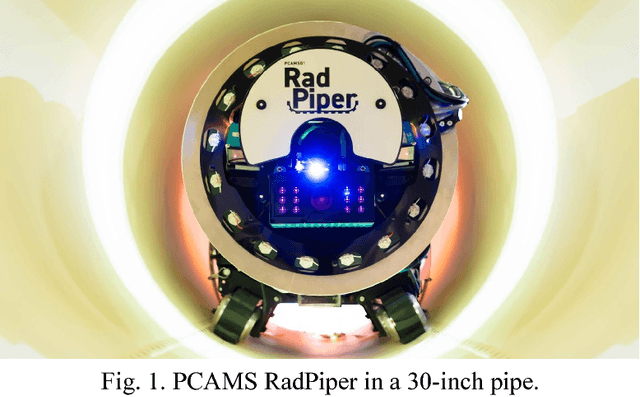
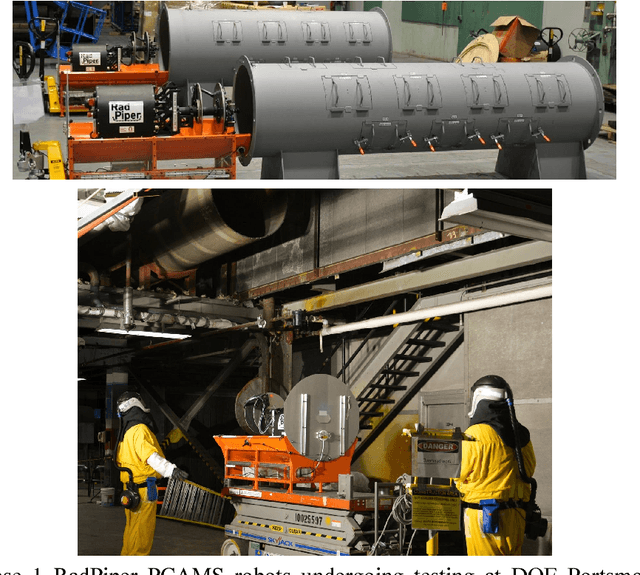
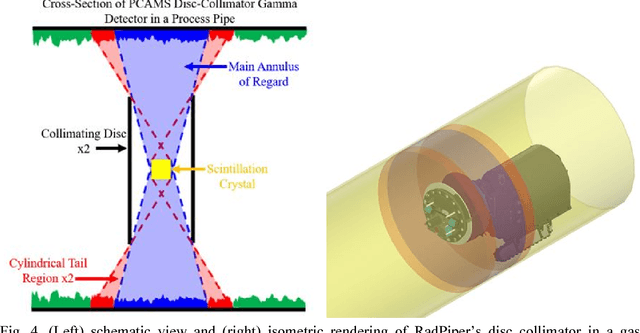
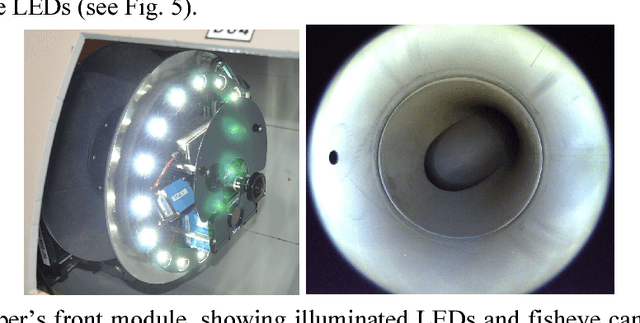
Miles of contaminated pipe must be measured, foot by foot, as part of the decommissioning effort at deactivated gaseous diffusion enrichment facilities. The current method requires cutting away asbestos-lined thermal enclosures and performing repeated, elevated operations to manually measure pipe from the outside. The RadPiper robot, part of the Pipe Crawling Activity Measurement System (PCAMS) developed by Carnegie Mellon University and commissioned for use at the DOE Portsmouth Gaseous Diffusion Enrichment Facility, automatically measures U-235 in pipes from the inside. This improves certainty, increases safety, and greatly reduces measurement time. The heart of the RadPiper robot is a sodium iodide scintillation detector in an innovative disc-collimated assembly. By measuring from inside pipes, the robot significantly increases its count rate relative to external through-pipe measurements. The robot also provides imagery, models interior pipe geometry, and precisely measures distance in order to localize radiation measurements. Data collected by this system provides insight into pipe interiors that is simply not possible from exterior measurements, all while keeping operators safer. This paper describes the technical details of the PCAMS RadPiper robot. Key features for this robot include precision distance measurement, in-pipe obstacle detection, ability to transform for two pipe sizes, and robustness in autonomous operation. Test results demonstrating the robot's functionality are presented, including deployment tolerance tests, safeguarding tests, and localization tests. Integrated robot tests are also shown.