Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHigh Precision In-Pipe Robot Localization with Reciprocal Sensor Fusion
Paper and Code
Feb 27, 2020
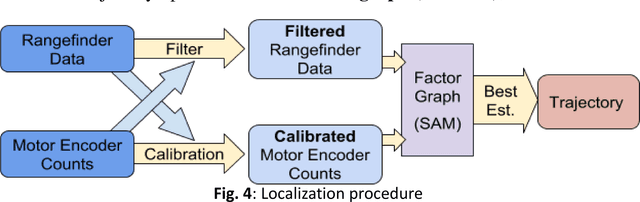
The huge advantage of in-pipe robots is that they are able to measure from inside the pipes, and to sense the geometry, appearance and radiometry directly. The downside is the inability to know precise, absolute position of the measurements in very long pipe runs. This paper develops the unprecedented localization required for this purpose.
* Waste Management Symposium, Phoenix US, Mar 3-7, #19516, WM
Symposia (2019) * 12 pages, "Superior Paper Award" on WM Symposia 2019
View paper on