 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe role of haptic communication in dyadic collaborative object manipulation tasks
Mar 02, 2022
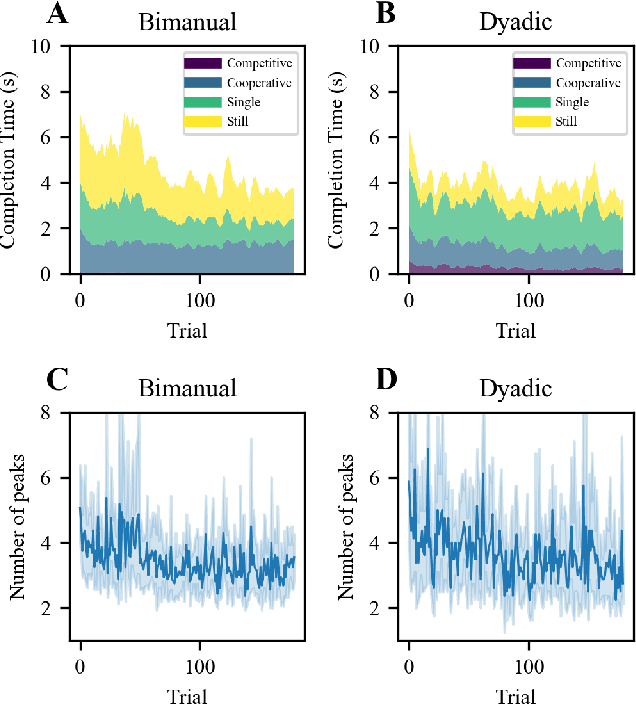
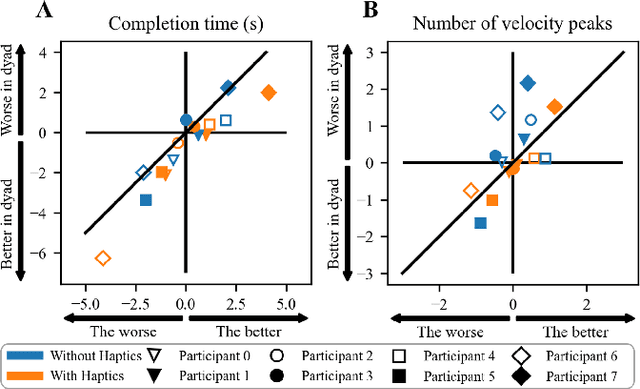
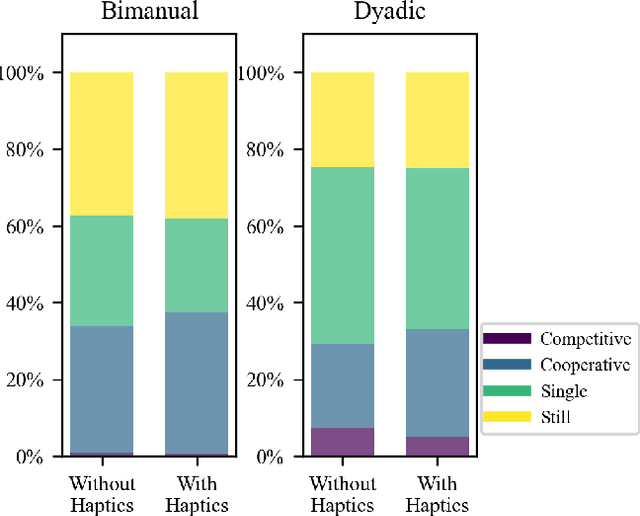
Intuitive and efficient physical human-robot collaboration relies on the mutual observability of the human and the robot, i.e. the two entities being able to interpret each other's intentions and actions. This is remedied by a myriad of methods involving human sensing or intention decoding, as well as human-robot turn-taking and sequential task planning. However, the physical interaction establishes a rich channel of communication through forces, torques and haptics in general, which is often overlooked in industrial implementations of human-robot interaction. In this work, we investigate the role of haptics in human collaborative physical tasks, to identify how to integrate physical communication in human-robot teams. We present a task to balance a ball at a target position on a board either bimanually by one participant, or dyadically by two participants, with and without haptic information. The task requires that the two sides coordinate with each other, in real-time, to balance the ball at the target. We found that with training the completion time and number of velocity peaks of the ball decreased, and that participants gradually became consistent in their braking strategy. Moreover we found that the presence of haptic information improved the performance (decreased completion time) and led to an increase in overall cooperative movements. Overall, our results show that humans can better coordinate with one another when haptic feedback is available. These results also highlight the likely importance of haptic communication in human-robot physical interaction, both as a tool to infer human intentions and to make the robot behaviour interpretable to humans.
Real-World Human-Robot Collaborative Reinforcement Learning
Mar 02, 2020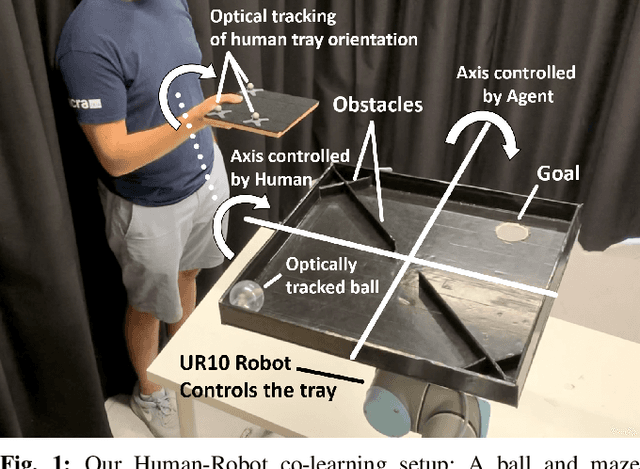
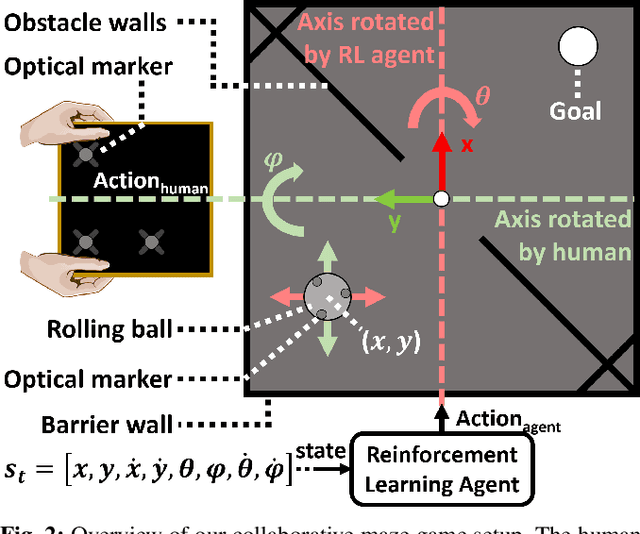

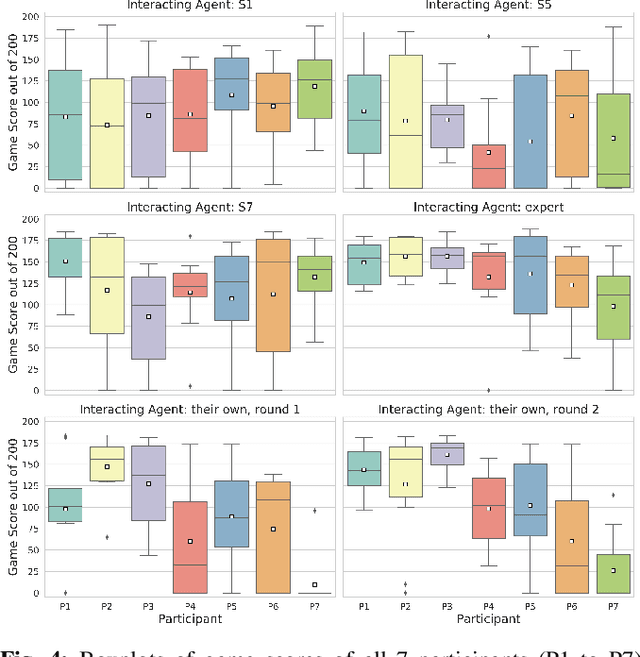
The intuitive collaboration of humans and intelligent robots (embodied AI) in the real-world is an essential objective for many desirable applications of robotics. Whilst there is much research regarding explicit communication, we focus on how humans and robots interact implicitly, on motor adaptation level. We present a real-world setup of a human-robot collaborative maze game, designed to be non-trivial and only solvable through collaboration, by limiting the actions to rotations of two orthogonal axes, and assigning each axes to one player. This results in neither the human nor the agent being able to solve the game on their own. We use a state-of-the-art reinforcement learning algorithm for the robotic agent, and achieve results within 30 minutes of real-world play, without any type of pre-training. We then use this system to perform systematic experiments on human/agent behaviour and adaptation when co-learning a policy for the collaborative game. We present results on how co-policy learning occurs over time between the human and the robotic agent resulting in each participant's agent serving as a representation of how they would play the game. This allows us to relate a person's success when playing with different agents than their own, by comparing the policy of the agent with that of their own agent.