 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBayesian Active Object Recognition and 6D Pose Estimation from Multimodal Contact Sensing
Mar 22, 2026We present an active tactile exploration framework for joint object recognition and 6D pose estimation. The proposed method integrates wrist force/torque sensing, GelSight tactile sensing, and free-space constraints within a Bayesian inference framework that maintains a belief over object class and pose during active tactile exploration. By combining contact and non-contact evidence, the framework reduces ambiguity and improves robustness in the joint class-pose estimation problem. To enable efficient inference in the large hypothesis space, we employ a customized particle filter that progressively samples particles based on new observations. The inferred belief is further used to guide active exploration by selecting informative next touches under reachability constraints. For effective data collection, a motion planning and control framework is developed to plan and execute feasible paths for tactile exploration, handle unexpected contacts and GelSight-surface alignment with tactile servoing. We evaluate the framework in simulation and on a Franka Panda robot using 11 YCB objects. Results show that incorporating tactile and free-space information substantially improves recognition and pose estimation accuracy and stability, while reducing the number of action cycles compared with force/torque-only baselines. Code, dataset, and supplementary material will be made available online.
Designing Persuasive Social Robots for Health Behavior Change: A Systematic Review of Behavior Change Strategies and Evaluation Methods
Jan 13, 2026Social robots are increasingly applied as health behavior change interventions, yet actionable knowledge to guide their design and evaluation remains limited. This systematic review synthesizes (1) the behavior change strategies used in existing HRI studies employing social robots to promote health behavior change, and (2) the evaluation methods applied to assess behavior change outcomes. Relevant literature was identified through systematic database searches and hand searches. Analysis of 39 studies revealed four overarching categories of behavior change strategies: coaching strategies, counseling strategies, social influence strategies, and persuasion-enhancing strategies. These strategies highlight the unique affordances of social robots as behavior change interventions and offer valuable design heuristics. The review also identified key characteristics of current evaluation practices, including study designs, settings, durations, and outcome measures, on the basis of which we propose several directions for future HRI research.
Robot-Initiated Social Control of Sedentary Behavior: Comparing the Impact of Relationship- and Target-Focused Strategies
Feb 12, 2025



To design social robots to effectively promote health behavior change, it is essential to understand how people respond to various health communication strategies employed by these robots. This study examines the effectiveness of two types of social control strategies from a social robot, relationship-focused strategies (emphasizing relational consequences) and target-focused strategies (emphasizing health consequences), in encouraging people to reduce sedentary behavior. A two-session lab experiment was conducted (n = 135), where participants first played a game with a robot, followed by the robot persuading them to stand up and move using one of the strategies. Half of the participants joined a second session to have a repeated interaction with the robot. Results showed that relationship-focused strategies motivated participants to stay active longer. Repeated sessions did not strengthen participants' relationship with the robot, but those who felt more attached to the robot responded more actively to the target-focused strategies. These findings offer valuable insights for designing persuasive strategies for social robots in health communication contexts.
Theory-based Habit Modeling for Enhancing Behavior Prediction
Jan 05, 2021
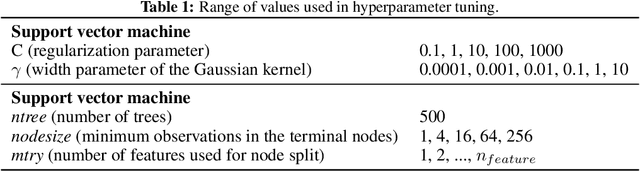
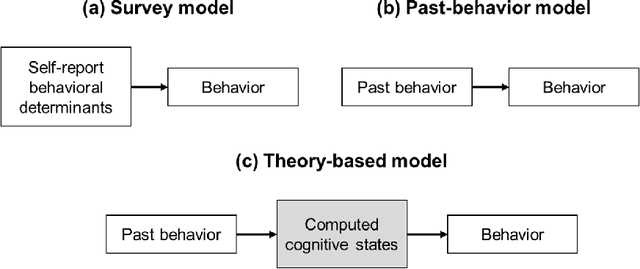
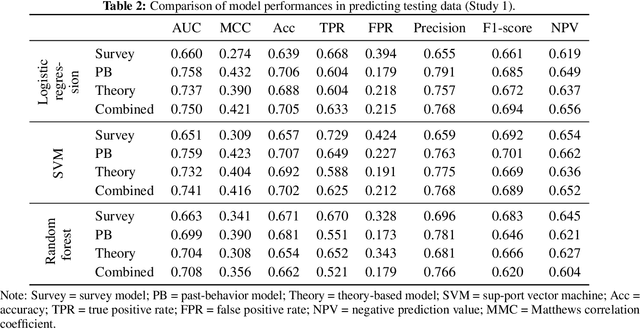
Psychological theories of habit posit that when a strong habit is formed through behavioral repetition, it can trigger behavior automatically in the same environment. Given the reciprocal relationship between habit and behavior, changing lifestyle behaviors (e.g., toothbrushing) is largely a task of breaking old habits and creating new and healthy ones. Thus, representing users' habit strengths can be very useful for behavior change support systems (BCSS), for example, to predict behavior or to decide when an intervention reaches its intended effect. However, habit strength is not directly observable and existing self-report measures are taxing for users. In this paper, built on recent computational models of habit formation, we propose a method to enable intelligent systems to compute habit strength based on observable behavior. The hypothesized advantage of using computed habit strength for behavior prediction was tested using data from two intervention studies, where we trained participants to brush their teeth twice a day for three weeks and monitored their behaviors using accelerometers. Through hierarchical cross-validation, we found that for the task of predicting future brushing behavior, computed habit strength clearly outperformed self-reported habit strength (in both studies) and was also superior to models based on past behavior frequency (in the larger second study). Our findings provide initial support for our theory-based approach of modeling user habits and encourages the use of habit computation to deliver personalized and adaptive interventions.