 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePattern-Guided Diffusion Models
Dec 15, 2025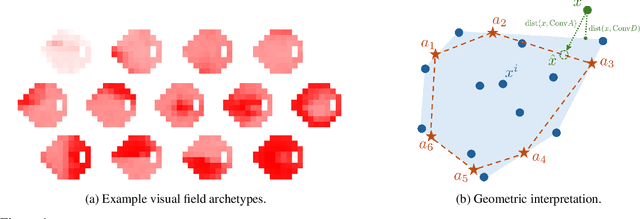
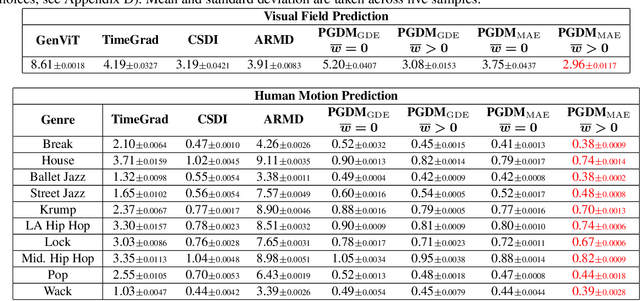
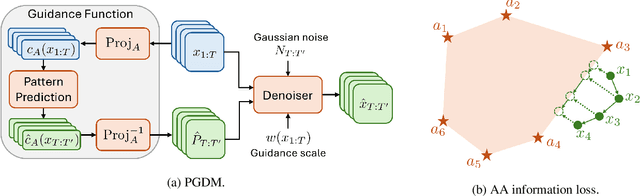
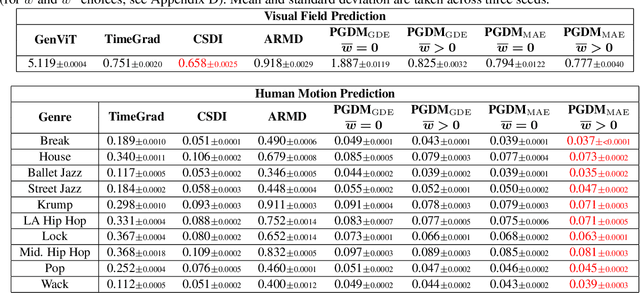
Diffusion models have shown promise in forecasting future data from multivariate time series. However, few existing methods account for recurring structures, or patterns, that appear within the data. We present Pattern-Guided Diffusion Models (PGDM), which leverage inherent patterns within temporal data for forecasting future time steps. PGDM first extracts patterns using archetypal analysis and estimates the most likely next pattern in the sequence. By guiding predictions with this pattern estimate, PGDM makes more realistic predictions that fit within the set of known patterns. We additionally introduce a novel uncertainty quantification technique based on archetypal analysis, and we dynamically scale the guidance level based on the pattern estimate uncertainty. We apply our method to two well-motivated forecasting applications, predicting visual field measurements and motion capture frames. On both, we show that pattern guidance improves PGDM's performance (MAE / CRPS) by up to 40.67% / 56.26% and 14.12% / 14.10%, respectively. PGDM also outperforms baselines by up to 65.58% / 84.83% and 93.64% / 92.55%.
Conformal Constrained Policy Optimization for Cost-Effective LLM Agents
Nov 14, 2025While large language models (LLMs) have recently made tremendous progress towards solving challenging AI problems, they have done so at increasingly steep computational and API costs. We propose a novel strategy where we combine multiple LLM models with varying cost/accuracy tradeoffs in an agentic manner, where models and tools are run in sequence as determined by an orchestration model to minimize cost subject to a user-specified level of reliability; this constraint is formalized using conformal prediction to provide guarantees. To solve this problem, we propose Conformal Constrained Policy Optimization (CCPO), a training paradigm that integrates constrained policy optimization with off-policy reinforcement learning and recent advances in online conformal prediction. CCPO jointly optimizes a cost-aware policy (score function) and an adaptive threshold. Across two multi-hop question answering benchmarks, CCPO achieves up to a 30% cost reduction compared to other cost-aware baselines and LLM-guided methods without compromising reliability. Our approach provides a principled and practical framework for deploying LLM agents that are significantly more cost-effective while maintaining reliability.
PAC Prediction Sets Under Label Shift
Oct 19, 2023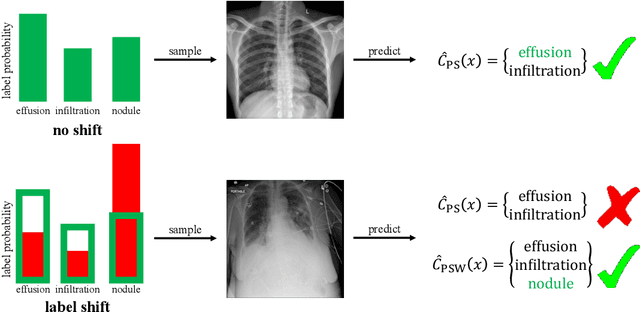
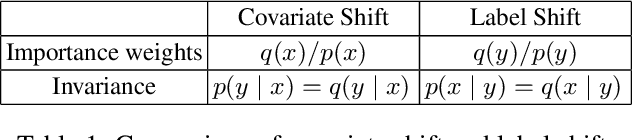
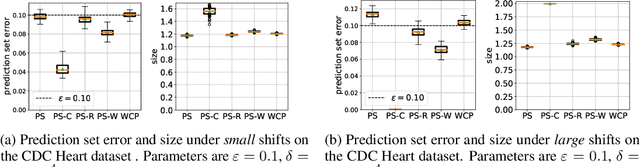
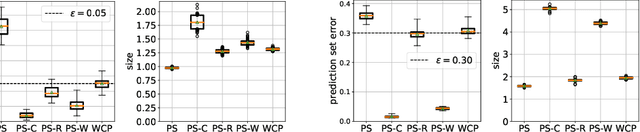
Prediction sets capture uncertainty by predicting sets of labels rather than individual labels, enabling downstream decisions to conservatively account for all plausible outcomes. Conformal inference algorithms construct prediction sets guaranteed to contain the true label with high probability. These guarantees fail to hold in the face of distribution shift, which is precisely when reliable uncertainty quantification can be most useful. We propose a novel algorithm for constructing prediction sets with PAC guarantees in the label shift setting. This method estimates the predicted probabilities of the classes in a target domain, as well as the confusion matrix, then propagates uncertainty in these estimates through a Gaussian elimination algorithm to compute confidence intervals for importance weights. Finally, it uses these intervals to construct prediction sets. We evaluate our approach on five datasets: the CIFAR-10, ChestX-Ray and Entity-13 image datasets, the tabular CDC Heart dataset, and the AGNews text dataset. Our algorithm satisfies the PAC guarantee while producing smaller, more informative, prediction sets compared to several baselines.
Detection of Adversarial Physical Attacks in Time-Series Image Data
Apr 27, 2023



Deep neural networks (DNN) have become a common sensing modality in autonomous systems as they allow for semantically perceiving the ambient environment given input images. Nevertheless, DNN models have proven to be vulnerable to adversarial digital and physical attacks. To mitigate this issue, several detection frameworks have been proposed to detect whether a single input image has been manipulated by adversarial digital noise or not. In our prior work, we proposed a real-time detector, called VisionGuard (VG), for adversarial physical attacks against single input images to DNN models. Building upon that work, we propose VisionGuard* (VG), which couples VG with majority-vote methods, to detect adversarial physical attacks in time-series image data, e.g., videos. This is motivated by autonomous systems applications where images are collected over time using onboard sensors for decision-making purposes. We emphasize that majority-vote mechanisms are quite common in autonomous system applications (among many other applications), as e.g., in autonomous driving stacks for object detection. In this paper, we investigate, both theoretically and experimentally, how this widely used mechanism can be leveraged to enhance the performance of adversarial detectors. We have evaluated VG* on videos of both clean and physically attacked traffic signs generated by a state-of-the-art robust physical attack. We provide extensive comparative experiments against detectors that have been designed originally for out-of-distribution data and digitally attacked images.