 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNavG: Risk-Aware Navigation in Crowded Environments Based on Reinforcement Learning with Guidance Points
Mar 03, 2025
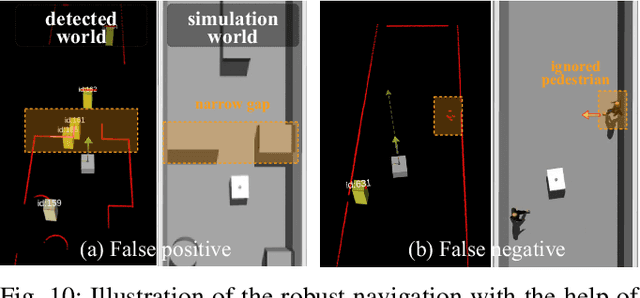
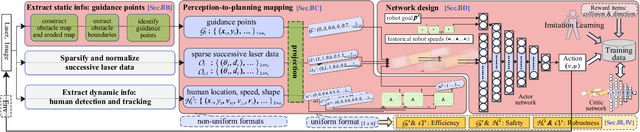

Motion planning in navigation systems is highly susceptible to upstream perceptual errors, particularly in human detection and tracking. To mitigate this issue, the concept of guidance points--a novel directional cue within a reinforcement learning-based framework--is introduced. A structured method for identifying guidance points is developed, consisting of obstacle boundary extraction, potential guidance point detection, and redundancy elimination. To integrate guidance points into the navigation pipeline, a perception-to-planning mapping strategy is proposed, unifying guidance points with other perceptual inputs and enabling the RL agent to effectively leverage the complementary relationships among raw laser data, human detection and tracking, and guidance points. Qualitative and quantitative simulations demonstrate that the proposed approach achieves the highest success rate and near-optimal travel times, greatly improving both safety and efficiency. Furthermore, real-world experiments in dynamic corridors and lobbies validate the robot's ability to confidently navigate around obstacles and robustly avoid pedestrians.
GA-TEB: Goal-Adaptive Framework for Efficient Navigation Based on Goal Lines
Sep 16, 2024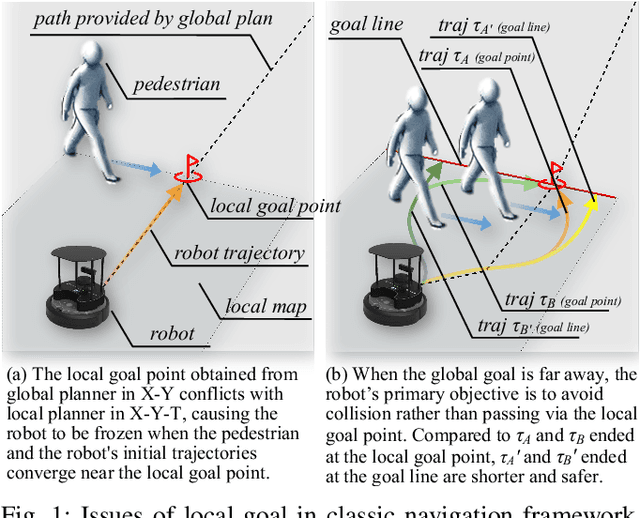
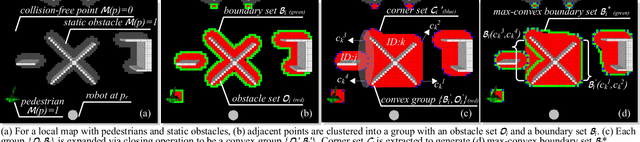
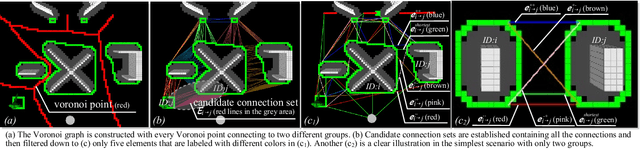
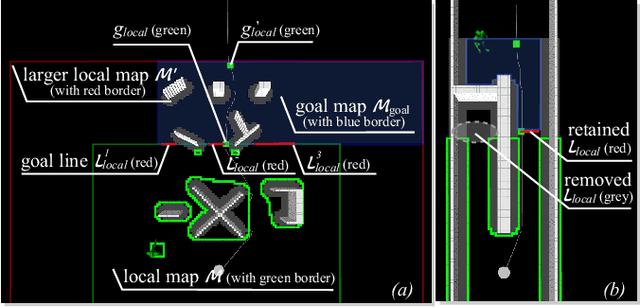
In crowd navigation, the local goal plays a crucial role in trajectory initialization, optimization, and evaluation. Recognizing that when the global goal is distant, the robot's primary objective is avoiding collisions, making it less critical to pass through the exact local goal point, this work introduces the concept of goal lines, which extend the traditional local goal from a single point to multiple candidate lines. Coupled with a topological map construction strategy that groups obstacles to be as convex as possible, a goal-adaptive navigation framework is proposed to efficiently plan multiple candidate trajectories. Simulations and experiments demonstrate that the proposed GA-TEB framework effectively prevents deadlock situations, where the robot becomes frozen due to a lack of feasible trajectories in crowded environments. Additionally, the framework greatly increases planning frequency in scenarios with numerous non-convex obstacles, enhancing both robustness and safety.