 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNavG: Risk-Aware Navigation in Crowded Environments Based on Reinforcement Learning with Guidance Points
Paper and Code

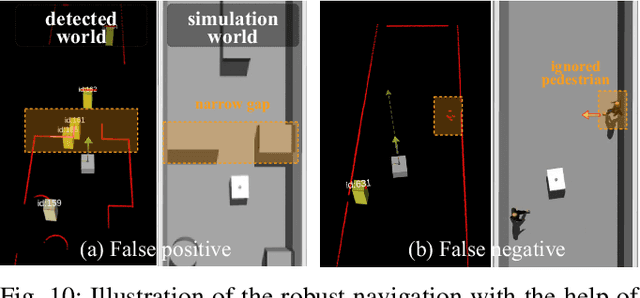
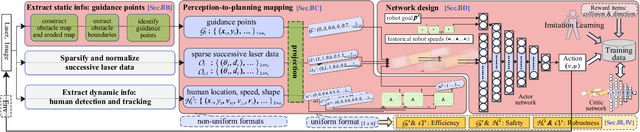

Motion planning in navigation systems is highly susceptible to upstream perceptual errors, particularly in human detection and tracking. To mitigate this issue, the concept of guidance points--a novel directional cue within a reinforcement learning-based framework--is introduced. A structured method for identifying guidance points is developed, consisting of obstacle boundary extraction, potential guidance point detection, and redundancy elimination. To integrate guidance points into the navigation pipeline, a perception-to-planning mapping strategy is proposed, unifying guidance points with other perceptual inputs and enabling the RL agent to effectively leverage the complementary relationships among raw laser data, human detection and tracking, and guidance points. Qualitative and quantitative simulations demonstrate that the proposed approach achieves the highest success rate and near-optimal travel times, greatly improving both safety and efficiency. Furthermore, real-world experiments in dynamic corridors and lobbies validate the robot's ability to confidently navigate around obstacles and robustly avoid pedestrians.