 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGA-TEB: Goal-Adaptive Framework for Efficient Navigation Based on Goal Lines
Paper and Code
Sep 16, 2024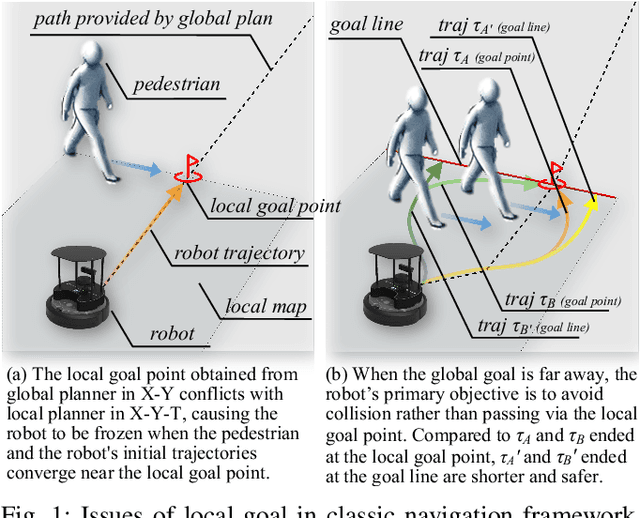
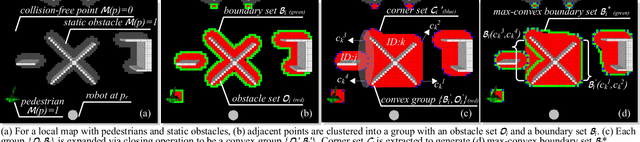
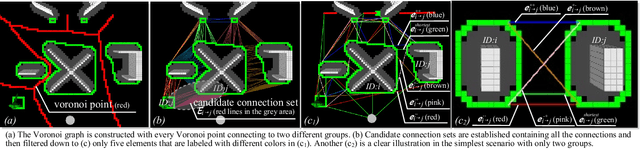
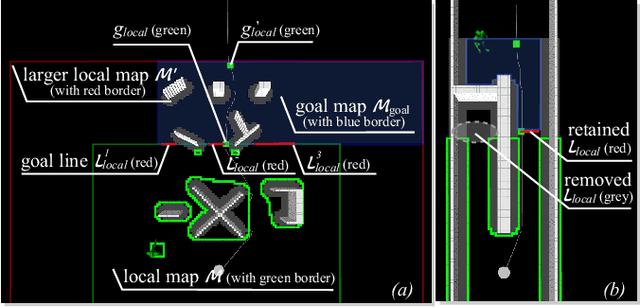
In crowd navigation, the local goal plays a crucial role in trajectory initialization, optimization, and evaluation. Recognizing that when the global goal is distant, the robot's primary objective is avoiding collisions, making it less critical to pass through the exact local goal point, this work introduces the concept of goal lines, which extend the traditional local goal from a single point to multiple candidate lines. Coupled with a topological map construction strategy that groups obstacles to be as convex as possible, a goal-adaptive navigation framework is proposed to efficiently plan multiple candidate trajectories. Simulations and experiments demonstrate that the proposed GA-TEB framework effectively prevents deadlock situations, where the robot becomes frozen due to a lack of feasible trajectories in crowded environments. Additionally, the framework greatly increases planning frequency in scenarios with numerous non-convex obstacles, enhancing both robustness and safety.