 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Fusion of Deep Reinforcement Learning and Edge Computing for Real-time Monitoring and Control Optimization in IoT Environments
Feb 28, 2024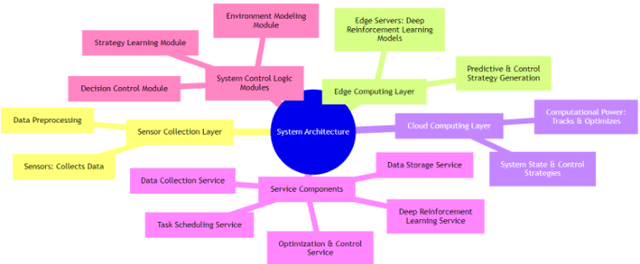
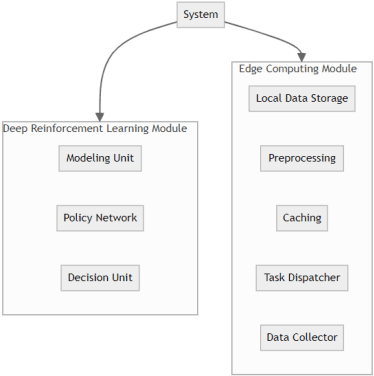
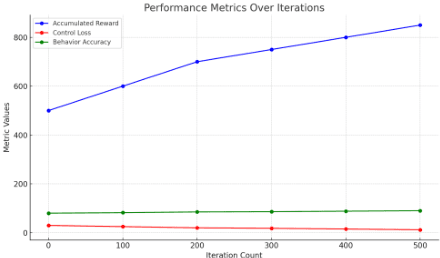
In response to the demand for real-time performance and control quality in industrial Internet of Things (IoT) environments, this paper proposes an optimization control system based on deep reinforcement learning and edge computing. The system leverages cloud-edge collaboration, deploys lightweight policy networks at the edge, predicts system states, and outputs controls at a high frequency, enabling monitoring and optimization of industrial objectives. Additionally, a dynamic resource allocation mechanism is designed to ensure rational scheduling of edge computing resources, achieving global optimization. Results demonstrate that this approach reduces cloud-edge communication latency, accelerates response to abnormal situations, reduces system failure rates, extends average equipment operating time, and saves costs for manual maintenance and replacement. This ensures real-time and stable control.
Automatic driving lane change safety prediction model based on LSTM
Feb 28, 2024



Autonomous driving technology can improve traffic safety and reduce traffic accidents. In addition, it improves traffic flow, reduces congestion, saves energy and increases travel efficiency. In the relatively mature automatic driving technology, the automatic driving function is divided into several modules: perception, decision-making, planning and control, and a reasonable division of labor can improve the stability of the system. Therefore, autonomous vehicles need to have the ability to predict the trajectory of surrounding vehicles in order to make reasonable decision planning and safety measures to improve driving safety. By using deep learning method, a safety-sensitive deep learning model based on short term memory (LSTM) network is proposed. This model can alleviate the shortcomings of current automatic driving trajectory planning, and the output trajectory not only ensures high accuracy but also improves safety. The cell state simulation algorithm simulates the trackability of the trajectory generated by this model. The research results show that compared with the traditional model-based method, the trajectory prediction method based on LSTM network has obvious advantages in predicting the trajectory in the long time domain. The intention recognition module considering interactive information has higher prediction and accuracy, and the algorithm results show that the trajectory is very smooth based on the premise of safe prediction and efficient lane change. And autonomous vehicles can efficiently and safely complete lane changes.
Application of Machine Learning Optimization in Cloud Computing Resource Scheduling and Management
Feb 27, 2024



In recent years, cloud computing has been widely used. Cloud computing refers to the centralized computing resources, users through the access to the centralized resources to complete the calculation, the cloud computing center will return the results of the program processing to the user. Cloud computing is not only for individual users, but also for enterprise users. By purchasing a cloud server, users do not have to buy a large number of computers, saving computing costs. According to a report by China Economic News Network, the scale of cloud computing in China has reached 209.1 billion yuan. At present, the more mature cloud service providers in China are Ali Cloud, Baidu Cloud, Huawei Cloud and so on. Therefore, this paper proposes an innovative approach to solve complex problems in cloud computing resource scheduling and management using machine learning optimization techniques. Through in-depth study of challenges such as low resource utilization and unbalanced load in the cloud environment, this study proposes a comprehensive solution, including optimization methods such as deep learning and genetic algorithm, to improve system performance and efficiency, and thus bring new breakthroughs and progress in the field of cloud computing resource management.Rational allocation of resources plays a crucial role in cloud computing. In the resource allocation of cloud computing, the cloud computing center has limited cloud resources, and users arrive in sequence. Each user requests the cloud computing center to use a certain number of cloud resources at a specific time.