 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGaussianPU: A Hybrid 2D-3D Upsampling Framework for Enhancing Color Point Clouds via 3D Gaussian Splatting
Sep 03, 2024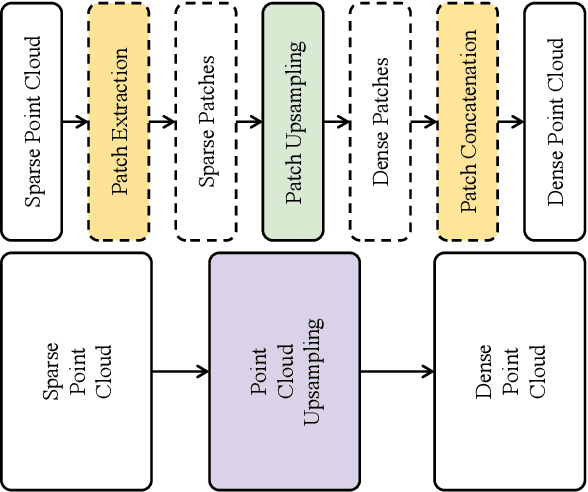
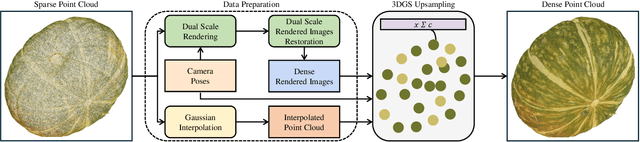


Dense colored point clouds enhance visual perception and are of significant value in various robotic applications. However, existing learning-based point cloud upsampling methods are constrained by computational resources and batch processing strategies, which often require subdividing point clouds into smaller patches, leading to distortions that degrade perceptual quality. To address this challenge, we propose a novel 2D-3D hybrid colored point cloud upsampling framework (GaussianPU) based on 3D Gaussian Splatting (3DGS) for robotic perception. This approach leverages 3DGS to bridge 3D point clouds with their 2D rendered images in robot vision systems. A dual scale rendered image restoration network transforms sparse point cloud renderings into dense representations, which are then input into 3DGS along with precise robot camera poses and interpolated sparse point clouds to reconstruct dense 3D point clouds. We have made a series of enhancements to the vanilla 3DGS, enabling precise control over the number of points and significantly boosting the quality of the upsampled point cloud for robotic scene understanding. Our framework supports processing entire point clouds on a single consumer-grade GPU, such as the NVIDIA GeForce RTX 3090, eliminating the need for segmentation and thus producing high-quality, dense colored point clouds with millions of points for robot navigation and manipulation tasks. Extensive experimental results on generating million-level point cloud data validate the effectiveness of our method, substantially improving the quality of colored point clouds and demonstrating significant potential for applications involving large-scale point clouds in autonomous robotics and human-robot interaction scenarios.