 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Shape-Aware Total Body Photography System for In-focus Surface Coverage Optimization
May 22, 2025Total Body Photography (TBP) is becoming a useful screening tool for patients at high risk for skin cancer. While much progress has been made, existing TBP systems can be further improved for automatic detection and analysis of suspicious skin lesions, which is in part related to the resolution and sharpness of acquired images. This paper proposes a novel shape-aware TBP system automatically capturing full-body images while optimizing image quality in terms of resolution and sharpness over the body surface. The system uses depth and RGB cameras mounted on a 360-degree rotary beam, along with 3D body shape estimation and an in-focus surface optimization method to select the optimal focus distance for each camera pose. This allows for optimizing the focused coverage over the complex 3D geometry of the human body given the calibrated camera poses. We evaluate the effectiveness of the system in capturing high-fidelity body images. The proposed system achieves an average resolution of 0.068 mm/pixel and 0.0566 mm/pixel with approximately 85% and 95% of surface area in-focus, evaluated on simulation data of diverse body shapes and poses as well as a real scan of a mannequin respectively. Furthermore, the proposed shape-aware focus method outperforms existing focus protocols (e.g. auto-focus). We believe the high-fidelity imaging enabled by the proposed system will improve automated skin lesion analysis for skin cancer screening.
Revisiting Lesion Tracking in 3D Total Body Photography
Dec 10, 2024



Melanoma is the most deadly form of skin cancer. Tracking the evolution of nevi and detecting new lesions across the body is essential for the early detection of melanoma. Despite prior work on longitudinal tracking of skin lesions in 3D total body photography, there are still several challenges, including 1) low accuracy for finding correct lesion pairs across scans, 2) sensitivity to noisy lesion detection, and 3) lack of large-scale datasets with numerous annotated lesion pairs. We propose a framework that takes in a pair of 3D textured meshes, matches lesions in the context of total body photography, and identifies unmatchable lesions. We start by computing correspondence maps bringing the source and target meshes to a template mesh. Using these maps to define source/target signals over the template domain, we construct a flow field aligning the mapped signals. The initial correspondence maps are then refined by advecting forward/backward along the vector field. Finally, lesion assignment is performed using the refined correspondence maps. We propose the first large-scale dataset for skin lesion tracking with 25K lesion pairs across 198 subjects. The proposed method achieves a success rate of 89.9% (at 10 mm criterion) for all pairs of annotated lesions and a matching accuracy of 98.2% for subjects with more than 200 lesions.
A Novel Method to Improve Quality Surface Coverage in Multi-View Capture
Jul 21, 2024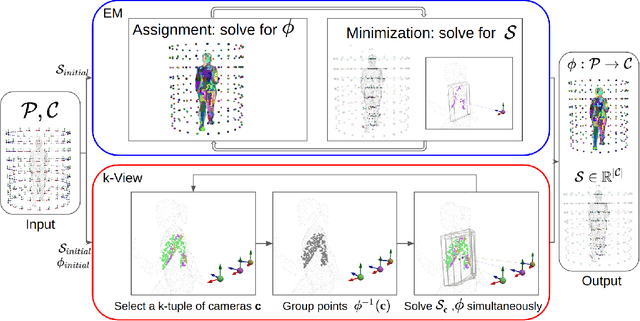
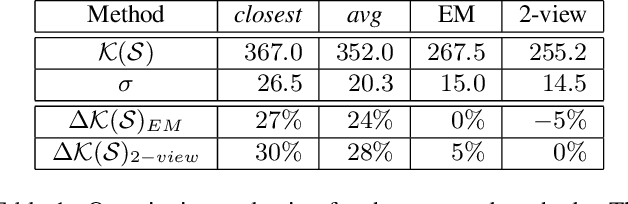
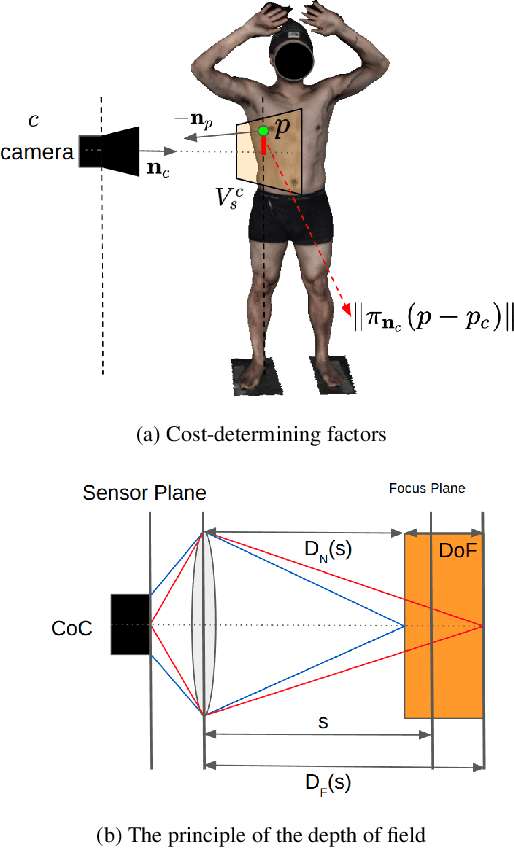

The depth of field of a camera is a limiting factor for applications that require taking images at a short subject-to-camera distance or using a large focal length, such as total body photography, archaeology, and other close-range photogrammetry applications. Furthermore, in multi-view capture, where the target is larger than the camera's field of view, an efficient way to optimize surface coverage captured with quality remains a challenge. Given the 3D mesh of the target object and camera poses, we propose a novel method to derive a focus distance for each camera that optimizes the quality of the covered surface area. We first design an Expectation-Minimization (EM) algorithm to assign points on the mesh uniquely to cameras and then solve for a focus distance for each camera given the associated point set. We further improve the quality surface coverage by proposing a $k$-view algorithm that solves for the points assignment and focus distances by considering multiple views simultaneously. We demonstrate the effectiveness of the proposed method under various simulations for total body photography. The EM and $k$-view algorithms improve the relative cost of the baseline single-view methods by at least $24$% and $28$% respectively, corresponding to increasing the in-focus surface area by roughly $1550$ cm$^2$ and $1780$ cm$^2$. We believe the algorithms can be useful in a number of vision applications that require photogrammetric details but are limited by the depth of field.
Skin Lesion Correspondence Localization in Total Body Photography
Jul 18, 2023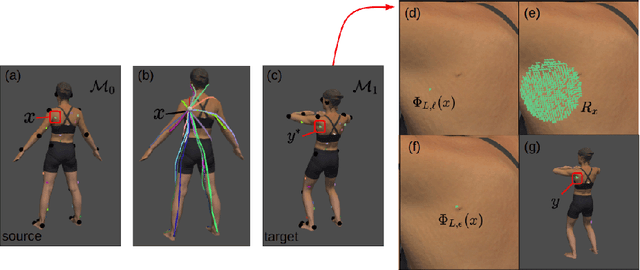

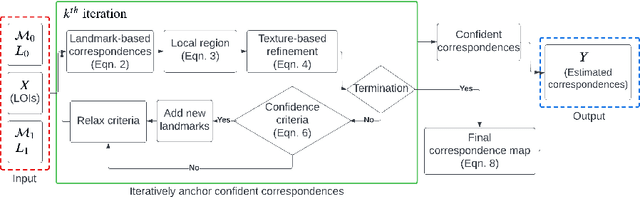
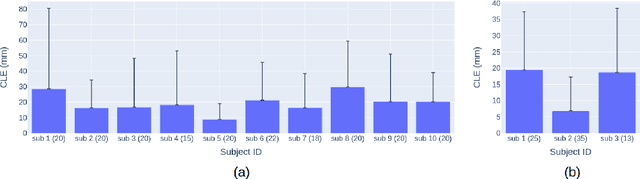
Longitudinal tracking of skin lesions - finding correspondence, changes in morphology, and texture - is beneficial to the early detection of melanoma. However, it has not been well investigated in the context of full-body imaging. We propose a novel framework combining geometric and texture information to localize skin lesion correspondence from a source scan to a target scan in total body photography (TBP). Body landmarks or sparse correspondence are first created on the source and target 3D textured meshes. Every vertex on each of the meshes is then mapped to a feature vector characterizing the geodesic distances to the landmarks on that mesh. Then, for each lesion of interest (LOI) on the source, its corresponding location on the target is first coarsely estimated using the geometric information encoded in the feature vectors and then refined using the texture information. We evaluated the framework quantitatively on both a public and a private dataset, for which our success rates (at 10 mm criterion) are comparable to the only reported longitudinal study. As full-body 3D capture becomes more prevalent and has higher quality, we expect the proposed method to constitute a valuable step in the longitudinal tracking of skin lesions.
A Robotic System for Implant Modification in Single-stage Cranioplasty
Jan 12, 2021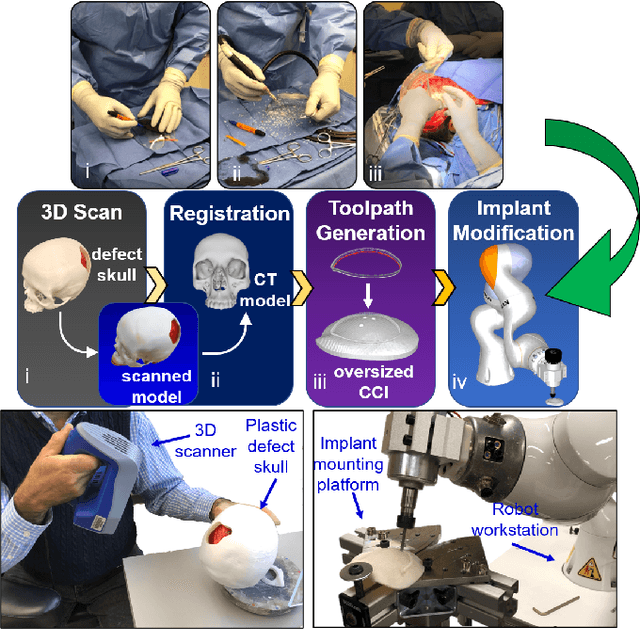
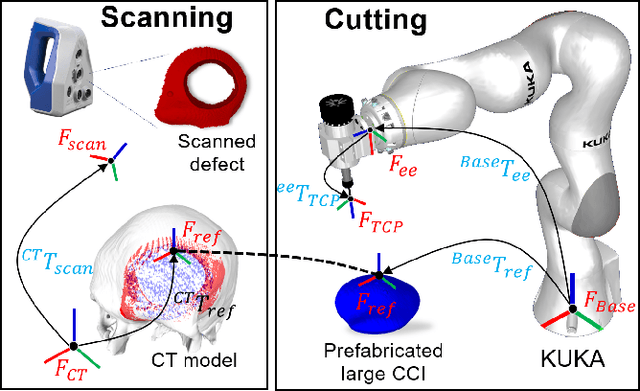
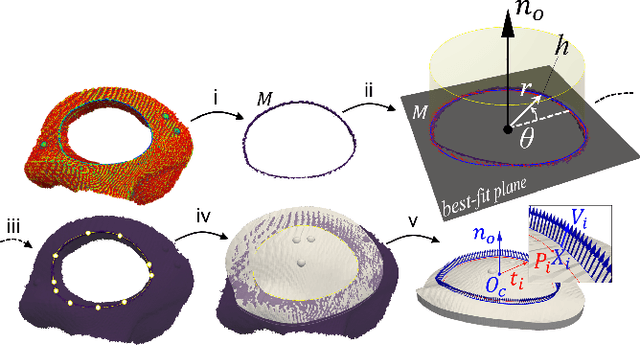
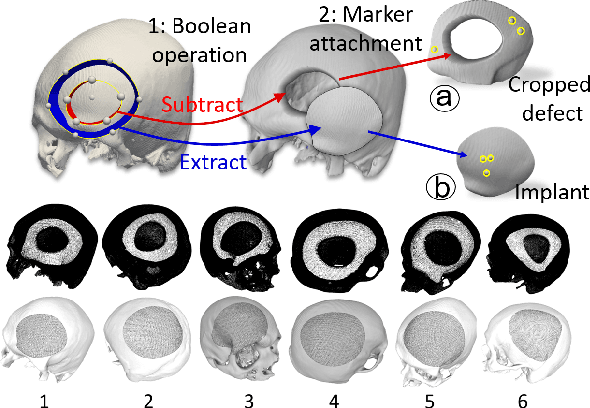
Craniomaxillofacial reconstruction with patient-specific customized craniofacial implants (CCIs) is most commonly performed for large-sized skeletal defects. Because the exact size of skull resection may not be known prior to the surgery, in the single-stage cranioplasty, a large CCI is prefabricated and resized intraoperatively with a manual-cutting process provided by a surgeon. The manual resizing, however, may be inaccurate and significantly add to the operating time. This paper introduces a fast and non-contact approach for intraoperatively determining the exact contour of the skull resection and automatically resizing the implant to fit the resection area. Our approach includes four steps: First, a patient's defect information is acquired by a 3D scanner. Second, the scanned defect is aligned to the CCI by registering the scanned defect to the reconstructed CT model. Third, a cutting toolpath is generated from the contour of the scanned defect. Lastly, the large CCI is resized by a cutting robot to fit the resection area according to the given toolpath. To evaluate the resizing performance of our method, six different resection shapes were used in the cutting experiments. We compared the performance of our method to the performances of surgeon's manual resizing and an existing technique which collects the defect contour with an optical tracking system and projects the contour on the CCI to guide the manual modification. The results show that our proposed method improves the resizing accuracy by 56% compared to the surgeon's manual modification and 42% compared to the projection method.