 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Shape-Aware Total Body Photography System for In-focus Surface Coverage Optimization
May 22, 2025Total Body Photography (TBP) is becoming a useful screening tool for patients at high risk for skin cancer. While much progress has been made, existing TBP systems can be further improved for automatic detection and analysis of suspicious skin lesions, which is in part related to the resolution and sharpness of acquired images. This paper proposes a novel shape-aware TBP system automatically capturing full-body images while optimizing image quality in terms of resolution and sharpness over the body surface. The system uses depth and RGB cameras mounted on a 360-degree rotary beam, along with 3D body shape estimation and an in-focus surface optimization method to select the optimal focus distance for each camera pose. This allows for optimizing the focused coverage over the complex 3D geometry of the human body given the calibrated camera poses. We evaluate the effectiveness of the system in capturing high-fidelity body images. The proposed system achieves an average resolution of 0.068 mm/pixel and 0.0566 mm/pixel with approximately 85% and 95% of surface area in-focus, evaluated on simulation data of diverse body shapes and poses as well as a real scan of a mannequin respectively. Furthermore, the proposed shape-aware focus method outperforms existing focus protocols (e.g. auto-focus). We believe the high-fidelity imaging enabled by the proposed system will improve automated skin lesion analysis for skin cancer screening.
Data-Driven Shape Sensing in Continuum Manipulators via Sliding Resistive Flex Sensors
Nov 29, 2023We introduce a novel shape-sensing method using Resistive Flex Sensors (RFS) embedded in cable-driven Continuum Dexterous Manipulators (CDMs). The RFS is predominantly sensitive to deformation rather than direct forces, making it a distinctive tool for shape sensing. The RFS unit we designed is a considerably less expensive and robust alternative, offering comparable accuracy and real-time performance to existing shape sensing methods used for the CDMs proposed for minimally-invasive surgery. Our design allows the RFS to move along and inside the CDM conforming to its curvature, offering the ability to capture resistance metrics from various bending positions without the need for elaborate sensor setups. The RFS unit is calibrated using an overhead camera and a ResNet machine learning framework. Experiments using a 3D printed prototype of the CDM achieved an average shape estimation error of 0.968 mm with a standard error of 0.275 mm. The response time of the model was approximately 1.16 ms, making real-time shape sensing feasible. While this preliminary study successfully showed the feasibility of our approach for C-shape CDM deformations with non-constant curvatures, we are currently extending the results to show the feasibility for adapting to more complex CDM configurations such as S-shape created in obstructed environments or in presence of the external forces.
ReBound: An Open-Source 3D Bounding Box Annotation Tool for Active Learning
Mar 11, 2023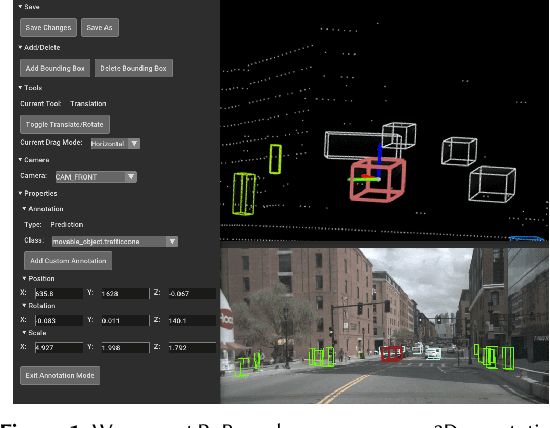
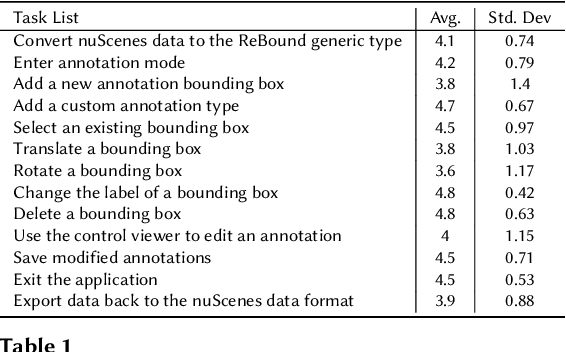

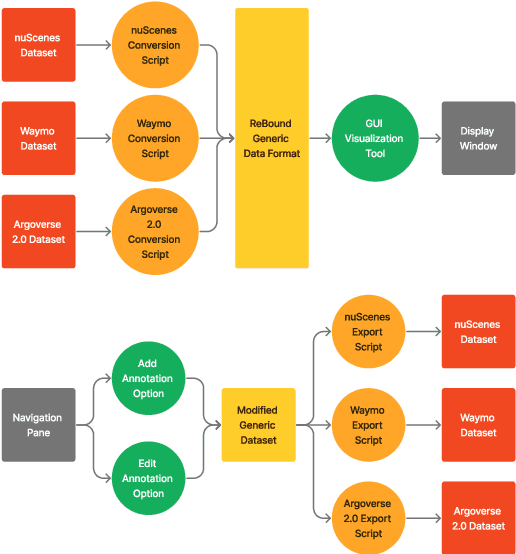
In recent years, supervised learning has become the dominant paradigm for training deep-learning based methods for 3D object detection. Lately, the academic community has studied 3D object detection in the context of autonomous vehicles (AVs) using publicly available datasets such as nuScenes and Argoverse 2.0. However, these datasets may have incomplete annotations, often only labeling a small subset of objects in a scene. Although commercial services exists for 3D bounding box annotation, these are often prohibitively expensive. To address these limitations, we propose ReBound, an open-source 3D visualization and dataset re-annotation tool that works across different datasets. In this paper, we detail the design of our tool and present survey results that highlight the usability of our software. Further, we show that ReBound is effective for exploratory data analysis and can facilitate active-learning. Our code and documentation is available at https://github.com/ajedgley/ReBound