 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-Time Aerial Fire Detection on Resource-Constrained Devices Using Knowledge Distillation
Feb 28, 2025Wildfire catastrophes cause significant environmental degradation, human losses, and financial damage. To mitigate these severe impacts, early fire detection and warning systems are crucial. Current systems rely primarily on fixed CCTV cameras with a limited field of view, restricting their effectiveness in large outdoor environments. The fusion of intelligent fire detection with remote sensing improves coverage and mobility, enabling monitoring in remote and challenging areas. Existing approaches predominantly utilize convolutional neural networks and vision transformer models. While these architectures provide high accuracy in fire detection, their computational complexity limits real-time performance on edge devices such as UAVs. In our work, we present a lightweight fire detection model based on MobileViT-S, compressed through the distillation of knowledge from a stronger teacher model. The ablation study highlights the impact of a teacher model and the chosen distillation technique on the model's performance improvement. We generate activation map visualizations using Grad-CAM to confirm the model's ability to focus on relevant fire regions. The high accuracy and efficiency of the proposed model make it well-suited for deployment on satellites, UAVs, and IoT devices for effective fire detection. Experiments on common fire benchmarks demonstrate that our model suppresses the state-of-the-art model by 0.44%, 2.00% while maintaining a compact model size. Our model delivers the highest processing speed among existing works, achieving real-time performance on resource-constrained devices.
Vision-Language Models for Edge Networks: A Comprehensive Survey
Feb 11, 2025

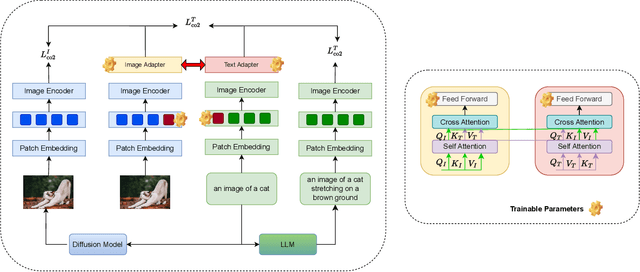
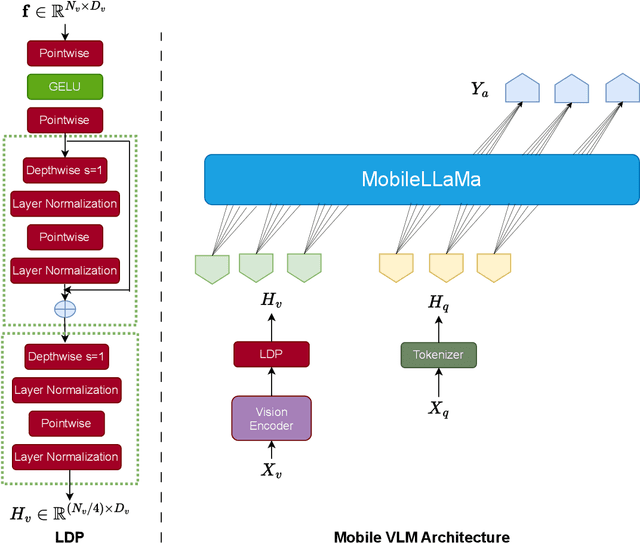
Vision Large Language Models (VLMs) combine visual understanding with natural language processing, enabling tasks like image captioning, visual question answering, and video analysis. While VLMs show impressive capabilities across domains such as autonomous vehicles, smart surveillance, and healthcare, their deployment on resource-constrained edge devices remains challenging due to processing power, memory, and energy limitations. This survey explores recent advancements in optimizing VLMs for edge environments, focusing on model compression techniques, including pruning, quantization, knowledge distillation, and specialized hardware solutions that enhance efficiency. We provide a detailed discussion of efficient training and fine-tuning methods, edge deployment challenges, and privacy considerations. Additionally, we discuss the diverse applications of lightweight VLMs across healthcare, environmental monitoring, and autonomous systems, illustrating their growing impact. By highlighting key design strategies, current challenges, and offering recommendations for future directions, this survey aims to inspire further research into the practical deployment of VLMs, ultimately making advanced AI accessible in resource-limited settings.
UAV-Assisted Real-Time Disaster Detection Using Optimized Transformer Model
Jan 21, 2025



Disaster recovery and management present significant challenges, particularly in unstable environments and hard-to-reach terrains. These difficulties can be overcome by employing unmanned aerial vehicles (UAVs) equipped with onboard embedded platforms and camera sensors. In this work, we address the critical need for accurate and timely disaster detection by enabling onboard aerial imagery processing and avoiding connectivity, privacy, and latency issues despite the challenges posed by limited onboard hardware resources. We propose a UAV-assisted edge framework for real-time disaster management, leveraging our proposed model optimized for real-time aerial image classification. The optimization of the model employs post-training quantization techniques. For real-world disaster scenarios, we introduce a novel dataset, DisasterEye, featuring UAV-captured disaster scenes as well as ground-level images taken by individuals on-site. Experimental results demonstrate the effectiveness of our model, achieving high accuracy with reduced inference latency and memory usage on resource-constrained devices. The framework's scalability and adaptability make it a robust solution for real-time disaster detection on resource-limited UAV platforms.