 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA-SFS: Semi-supervised Feature Selection based on Multi-task Self-supervision
Jul 19, 2022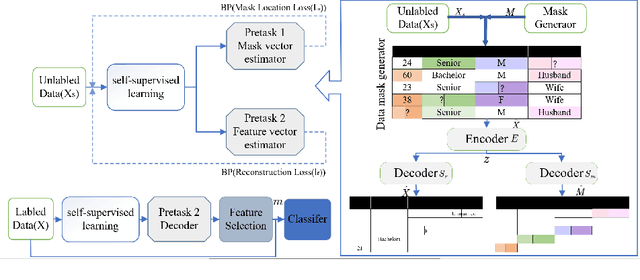

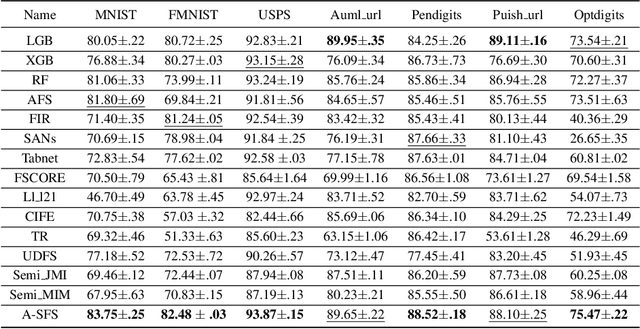
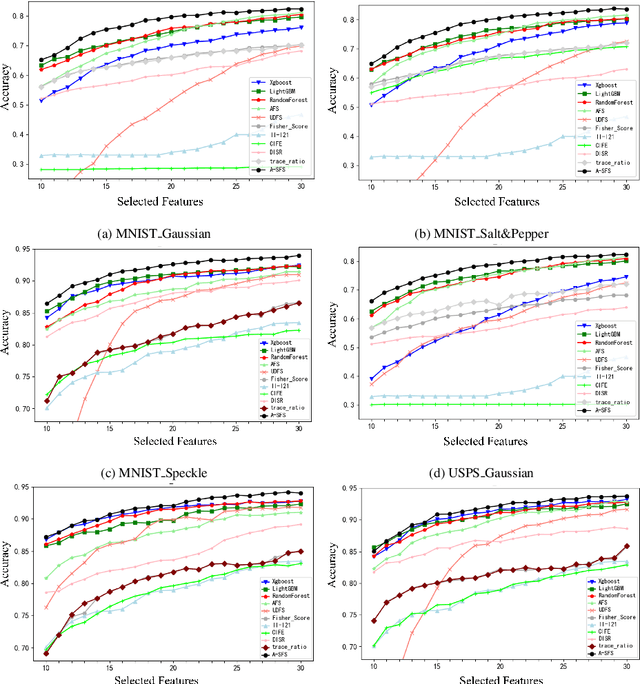
Feature selection is an important process in machine learning. It builds an interpretable and robust model by selecting the features that contribute the most to the prediction target. However, most mature feature selection algorithms, including supervised and semi-supervised, fail to fully exploit the complex potential structure between features. We believe that these structures are very important for the feature selection process, especially when labels are lacking and data is noisy. To this end, we innovatively introduce a deep learning-based self-supervised mechanism into feature selection problems, namely batch-Attention-based Self-supervision Feature Selection(A-SFS). Firstly, a multi-task self-supervised autoencoder is designed to uncover the hidden structure among features with the support of two pretext tasks. Guided by the integrated information from the multi-self-supervised learning model, a batch-attention mechanism is designed to generate feature weights according to batch-based feature selection patterns to alleviate the impacts introduced by a handful of noisy data. This method is compared to 14 major strong benchmarks, including LightGBM and XGBoost. Experimental results show that A-SFS achieves the highest accuracy in most datasets. Furthermore, this design significantly reduces the reliance on labels, with only 1/10 labeled data needed to achieve the same performance as those state of art baselines. Results show that A-SFS is also most robust to the noisy and missing data.
An Embedded Feature Selection Framework for Control
Jun 19, 2022

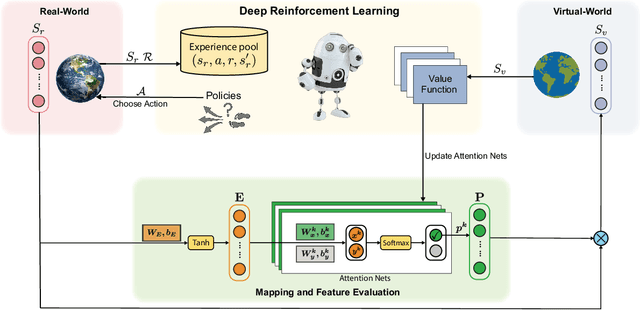
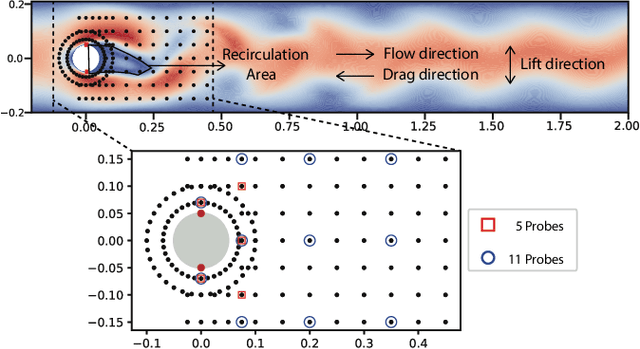
Reducing sensor requirements while keeping optimal control performance is crucial to many industrial control applications to achieve robust, low-cost, and computation-efficient controllers. However, existing feature selection solutions for the typical machine learning domain can hardly be applied in the domain of control with changing dynamics. In this paper, a novel framework, namely the Dual-world embedded Attentive Feature Selection (D-AFS), can efficiently select the most relevant sensors for the system under dynamic control. Rather than the one world used in most Deep Reinforcement Learning (DRL) algorithms, D-AFS has both the real world and its virtual peer with twisted features. By analyzing the DRL's response in two worlds, D-AFS can quantitatively identify respective features' importance towards control. A well-known active flow control problem, cylinder drag reduction, is used for evaluation. Results show that D-AFS successfully finds an optimized five-probes layout with 18.7\% drag reduction than the state-of-the-art solution with 151 probes and 49.2\% reduction than five-probes layout by human experts. We also apply this solution to four OpenAI classical control cases. In all cases, D-AFS achieves the same or better sensor configurations than originally provided solutions. Results highlight, we argued, a new way to achieve efficient and optimal sensor designs for experimental or industrial systems. Our source codes are made publicly available at https://github.com/G-AILab/DAFSFluid.