 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeITPP: Learning Disentangled Event Dynamics in Marked Temporal Point Processes
Nov 08, 2025Marked Temporal Point Processes (MTPPs) provide a principled framework for modeling asynchronous event sequences by conditioning on the history of past events. However, most existing MTPP models rely on channel-mixing strategies that encode information from different event types into a single, fixed-size latent representation. This entanglement can obscure type-specific dynamics, leading to performance degradation and increased risk of overfitting. In this work, we introduce ITPP, a novel channel-independent architecture for MTPP modeling that decouples event type information using an encoder-decoder framework with an ODE-based backbone. Central to ITPP is a type-aware inverted self-attention mechanism, designed to explicitly model inter-channel correlations among heterogeneous event types. This architecture enhances effectiveness and robustness while reducing overfitting. Comprehensive experiments on multiple real-world and synthetic datasets demonstrate that ITPP consistently outperforms state-of-the-art MTPP models in both predictive accuracy and generalization.
Fine-grained Spatio-temporal Event Prediction with Self-adaptive Anchor Graph
Jan 15, 2025Event prediction tasks often handle spatio-temporal data distributed in a large spatial area. Different regions in the area exhibit different characteristics while having latent correlations. This spatial heterogeneity and correlations greatly affect the spatio-temporal distributions of event occurrences, which has not been addressed by state-of-the-art models. Learning spatial dependencies of events in a continuous space is challenging due to its fine granularity and a lack of prior knowledge. In this work, we propose a novel Graph Spatio-Temporal Point Process (GSTPP) model for fine-grained event prediction. It adopts an encoder-decoder architecture that jointly models the state dynamics of spatially localized regions using neural Ordinary Differential Equations (ODEs). The state evolution is built on the foundation of a novel Self-Adaptive Anchor Graph (SAAG) that captures spatial dependencies. By adaptively localizing the anchor nodes in the space and jointly constructing the correlation edges between them, the SAAG enhances the model's ability of learning complex spatial event patterns. The proposed GSTPP model greatly improves the accuracy of fine-grained event prediction. Extensive experimental results show that our method greatly improves the prediction accuracy over existing spatio-temporal event prediction approaches.
Non-Autoregressive Diffusion-based Temporal Point Processes for Continuous-Time Long-Term Event Prediction
Nov 02, 2023



Continuous-time long-term event prediction plays an important role in many application scenarios. Most existing works rely on autoregressive frameworks to predict event sequences, which suffer from error accumulation, thus compromising prediction quality. Inspired by the success of denoising diffusion probabilistic models, we propose a diffusion-based non-autoregressive temporal point process model for long-term event prediction in continuous time. Instead of generating events one at a time in an autoregressive way, our model predicts the future event sequence entirely as a whole. In order to perform diffusion processes on event sequences, we develop a bidirectional map between target event sequences and the Euclidean vector space. Furthermore, we design a novel denoising network to capture both sequential and contextual features for better sample quality. Extensive experiments are conducted to prove the superiority of our proposed model over state-of-the-art methods on long-term event prediction in continuous time. To the best of our knowledge, this is the first work to apply diffusion methods to long-term event prediction problems.
Intensity-free Convolutional Temporal Point Process: Incorporating Local and Global Event Contexts
Jun 24, 2023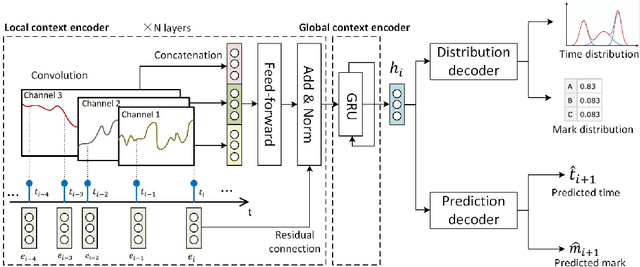
Event prediction in the continuous-time domain is a crucial but rather difficult task. Temporal point process (TPP) learning models have shown great advantages in this area. Existing models mainly focus on encoding global contexts of events using techniques like recurrent neural networks (RNNs) or self-attention mechanisms. However, local event contexts also play an important role in the occurrences of events, which has been largely ignored. Popular convolutional neural networks, which are designated for local context capturing, have never been applied to TPP modelling due to their incapability of modelling in continuous time. In this work, we propose a novel TPP modelling approach that combines local and global contexts by integrating a continuous-time convolutional event encoder with an RNN. The presented framework is flexible and scalable to handle large datasets with long sequences and complex latent patterns. The experimental result shows that the proposed model improves the performance of probabilistic sequential modelling and the accuracy of event prediction. To our best knowledge, this is the first work that applies convolutional neural networks to TPP modelling.