 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynaGSLAM: Real-Time Gaussian-Splatting SLAM for Online Rendering, Tracking, Motion Predictions of Moving Objects in Dynamic Scenes
Mar 15, 2025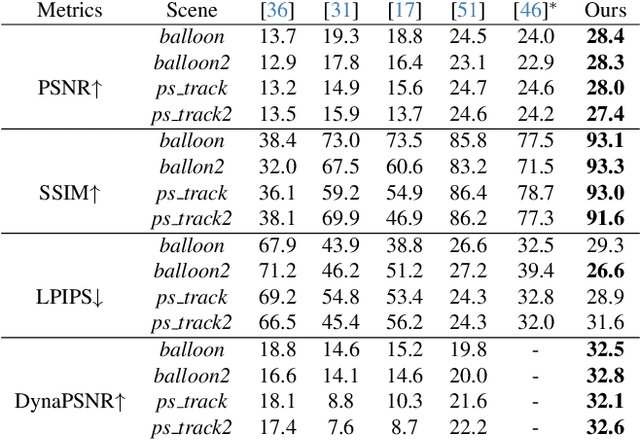
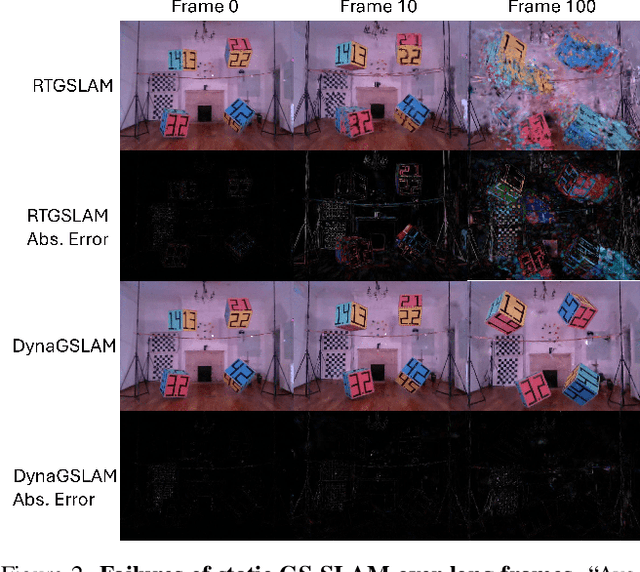
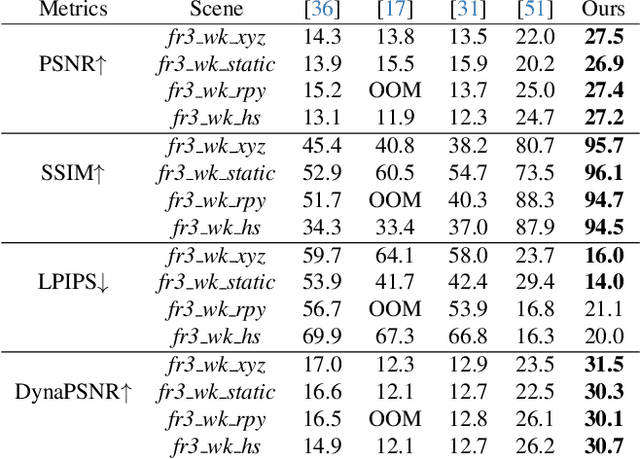
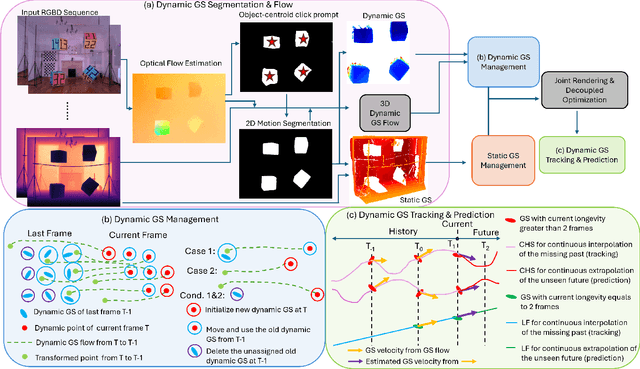
Simultaneous Localization and Mapping (SLAM) is one of the most important environment-perception and navigation algorithms for computer vision, robotics, and autonomous cars/drones. Hence, high quality and fast mapping becomes a fundamental problem. With the advent of 3D Gaussian Splatting (3DGS) as an explicit representation with excellent rendering quality and speed, state-of-the-art (SOTA) works introduce GS to SLAM. Compared to classical pointcloud-SLAM, GS-SLAM generates photometric information by learning from input camera views and synthesize unseen views with high-quality textures. However, these GS-SLAM fail when moving objects occupy the scene that violate the static assumption of bundle adjustment. The failed updates of moving GS affects the static GS and contaminates the full map over long frames. Although some efforts have been made by concurrent works to consider moving objects for GS-SLAM, they simply detect and remove the moving regions from GS rendering ("anti'' dynamic GS-SLAM), where only the static background could benefit from GS. To this end, we propose the first real-time GS-SLAM, "DynaGSLAM'', that achieves high-quality online GS rendering, tracking, motion predictions of moving objects in dynamic scenes while jointly estimating accurate ego motion. Our DynaGSLAM outperforms SOTA static & "Anti'' dynamic GS-SLAM on three dynamic real datasets, while keeping speed and memory efficiency in practice.