 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDataset and Benchmarking of Real-Time Embedded Object Detection for RoboCup SSL
Jun 28, 2021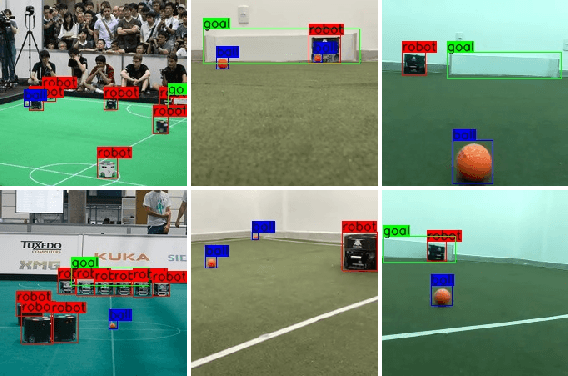

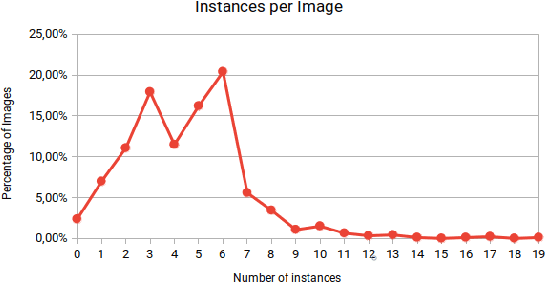

When producing a model to object detection in a specific context, the first obstacle is to have a dataset labeling the desired classes. In RoboCup, some leagues already have more than one dataset to train and evaluate a model. However, in the Small Size League (SSL), there is not such dataset available yet. This paper presents an open-source dataset to be used as a benchmark for real-time object detection in SSL. This work also presented a pipeline to train, deploy, and evaluate Convolutional Neural Networks (CNNs) models in a low-power embedded system. This pipeline was used to evaluate the proposed dataset with state-of-art optimized models. In this dataset, the MobileNet SSD v1 achieves 44.88% AP (68.81% AP50) at 94 Frames Per Second (FPS) while running on an SSL robot.
Squeezed Deep 6DoF Object Detection Using Knowledge Distillation
Mar 31, 2020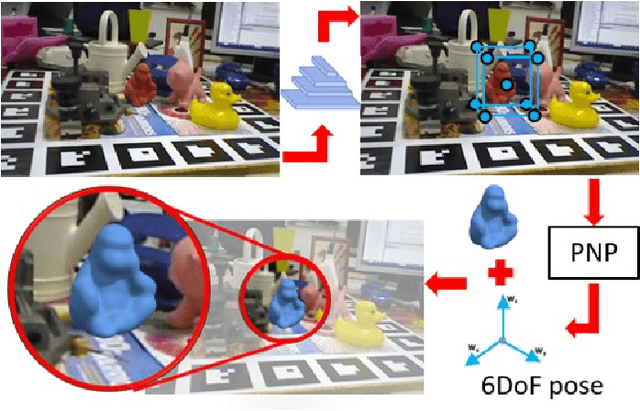
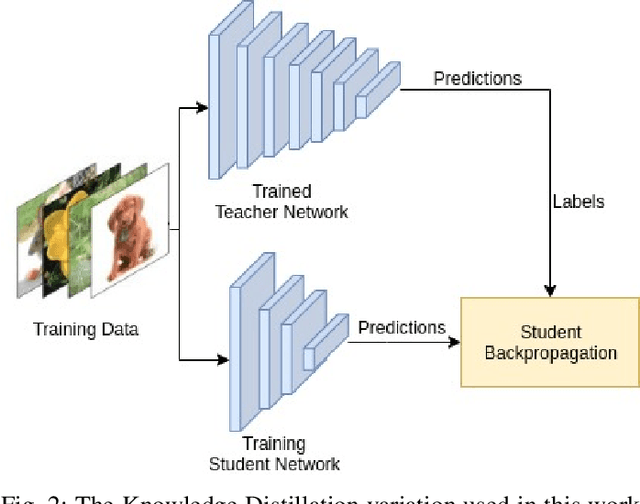
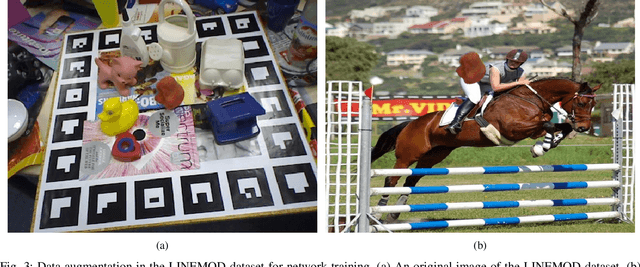
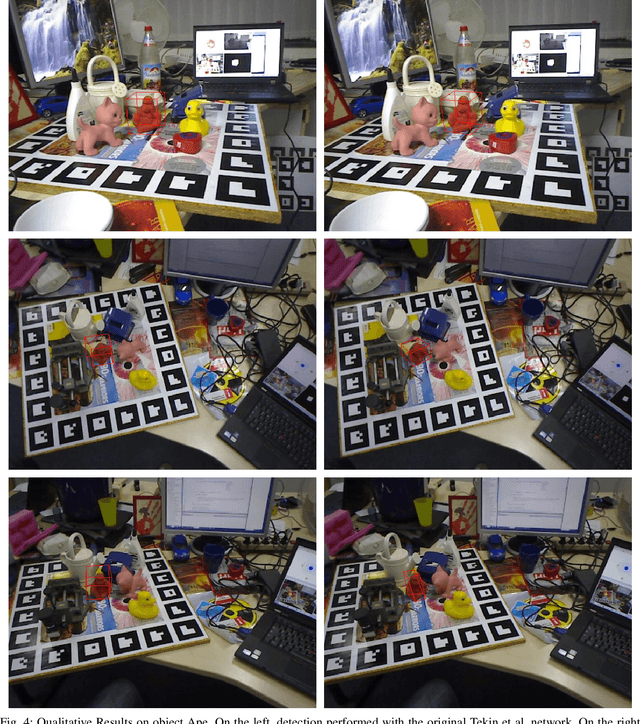
The detection of objects considering a 6DoF pose is common requisite to build virtual and augmented reality applications. It is usually a complex task witch requires real-time processing and high precision results for an adequate user experience. Recently, different deep learning techniques have been proposed to detect objects in 6DoF in RGB images but they rely on high complexity networks, requiring a computational power that prevents them to work on mobile devices. In this paper, we propose an approach to reduce the complexity of 6DoF detection networks while maintaining accuracy. We used Knowledge Distillation to teach portables Convolutional Neural Networks (CNN) to learn from a real-time 6DoF detection CNN. The proposed method allows real-time applications using only RGB images while decreasing the hardware requirements. We used the LINEMOD dataset to evaluate the proposed method and the experimental results show that the proposed method reduces the memory requirement almost 99\% in comparison to the original architecture reducing half the accuracy in one of the metrics. Code is available at https://github.com/heitorcfelix/singleshot6Dpose